 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual Detection of Diver Attentiveness for Underwater Human-Robot Interaction
Paper and Code
Sep 28, 2022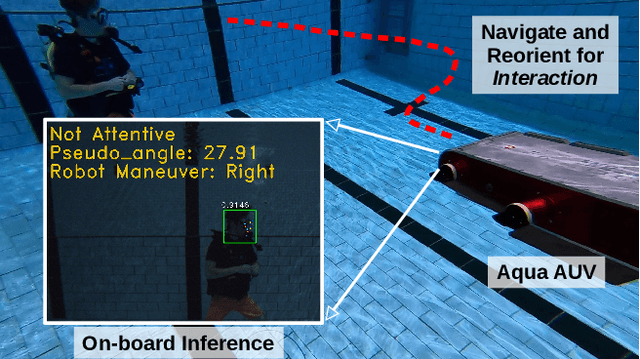
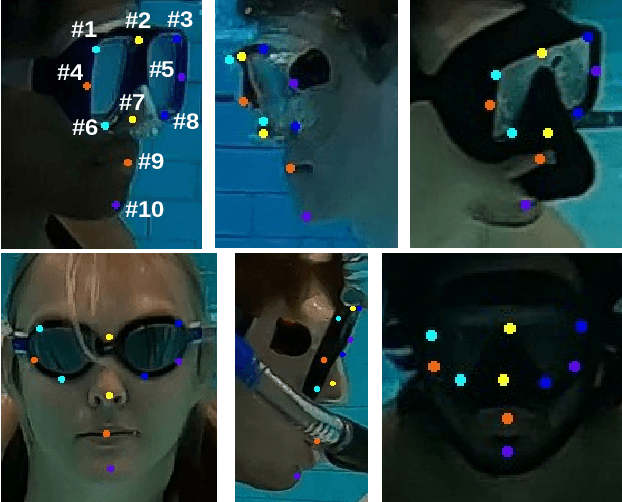

Many underwater tasks, such as cable-and-wreckage inspection, search-and-rescue, benefit from robust human-robot interaction (HRI) capabilities. With the recent advancements in vision-based underwater HRI methods, autonomous underwater vehicles (AUVs) can communicate with their human partners even during a mission. However, these interactions usually require active participation especially from humans (e.g., one must keep looking at the robot during an interaction). Therefore, an AUV must know when to start interacting with a human partner, i.e., if the human is paying attention to the AUV or not. In this paper, we present a diver attention estimation framework for AUVs to autonomously detect the attentiveness of a diver and then navigate and reorient itself, if required, with respect to the diver to initiate an interaction. The core element of the framework is a deep neural network (called DATT-Net) which exploits the geometric relation among 10 facial keypoints of the divers to determine their head orientation. Our on-the-bench experimental evaluations (using unseen data) demonstrate that the proposed DATT-Net architecture can determine the attentiveness of human divers with promising accuracy. Our real-world experiments also confirm the efficacy of DATT-Net which enables real-time inference and allows the AUV to position itself for an AUV-diver interaction.