 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-Based Navigation III: Pose and Motion from Omnidirectional Optical Flow and a Digital Terrain Map
Paper and Code
Aug 16, 2011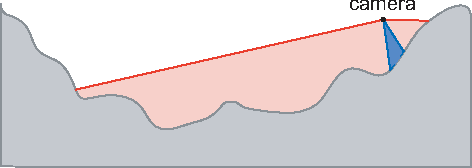
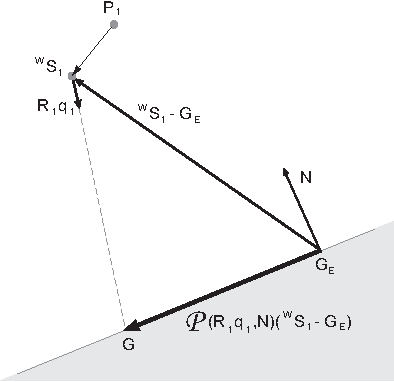
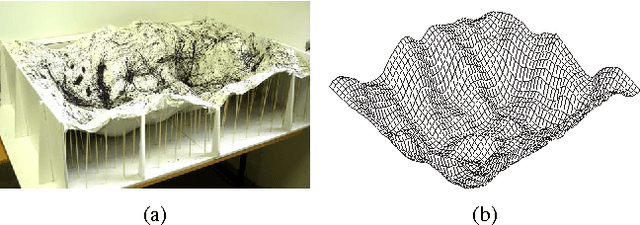
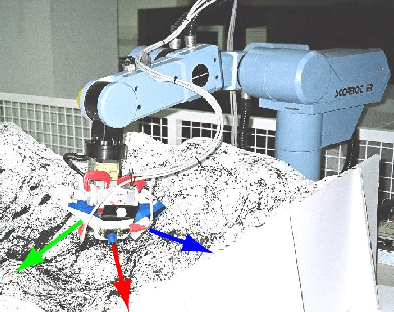
An algorithm for pose and motion estimation using corresponding features in omnidirectional images and a digital terrain map is proposed. In previous paper, such algorithm for regular camera was considered. Using a Digital Terrain (or Digital Elevation) Map (DTM/DEM) as a global reference enables recovering the absolute position and orientation of the camera. In order to do this, the DTM is used to formulate a constraint between corresponding features in two consecutive frames. In this paper, these constraints are extended to handle non-central projection, as is the case with many omnidirectional systems. The utilization of omnidirectional data is shown to improve the robustness and accuracy of the navigation algorithm. The feasibility of this algorithm is established through lab experimentation with two kinds of omnidirectional acquisition systems. The first one is polydioptric cameras while the second is catadioptric camera.