Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-Based Navigation I: A navigation filter for fusing DTM/correspondence updates
Paper and Code
Jul 10, 2012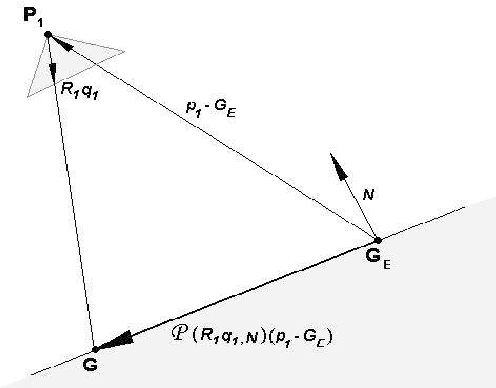
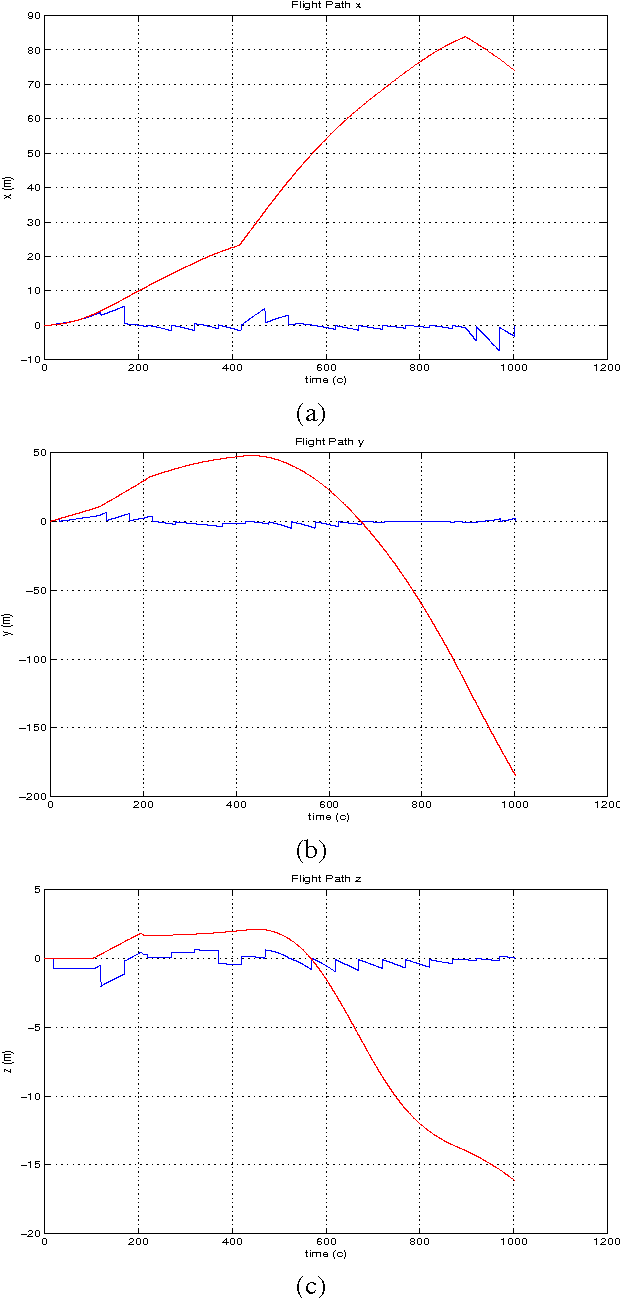
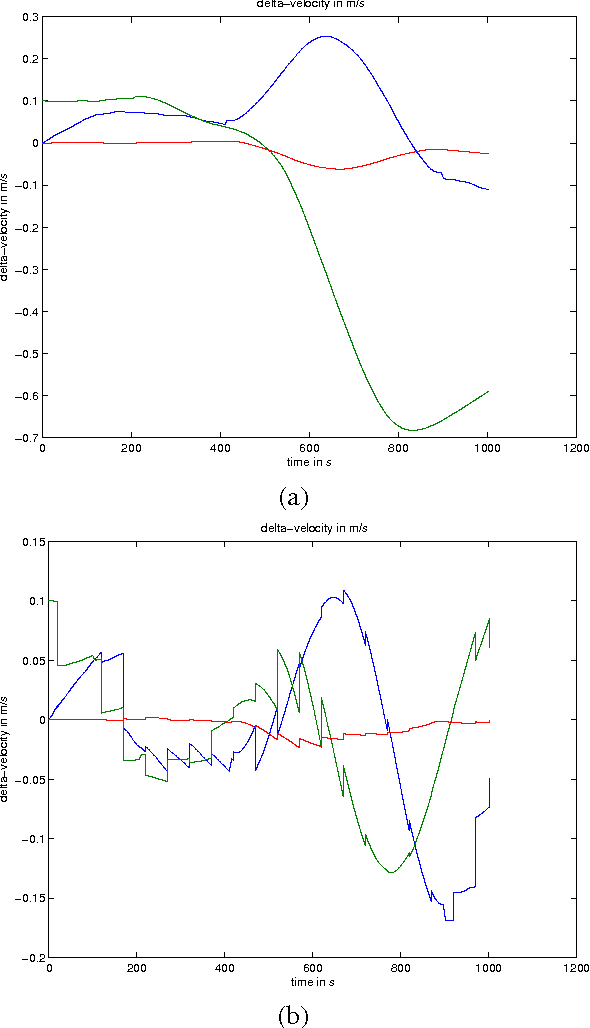
An algorithm for pose and motion estimation using corresponding features in images and a digital terrain map is proposed. Using a Digital Terrain (or Digital Elevation) Map (DTM/DEM) as a global reference enables recovering the absolute position and orientation of the camera. In order to do this, the DTM is used to formulate a constraint between corresponding features in two consecutive frames. The utilization of data is shown to improve the robustness and accuracy of the inertial navigation algorithm. Extended Kalman filter was used to combine results of inertial navigation algorithm and proposed vision-based navigation algorithm. The feasibility of this algorithms is established through numerical simulations.
* Proceedings of the IEEE International Conference on Robotics and
Biomimetics (ROBIO), 2011 , Page(s): 1591 - 1596 * 26 pages, 3 figures, in English and in Russian. arXiv admin note:
substantial text overlap with arXiv:1106.6341, arXiv:1107.1470
View paper on