 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-based Excavator Activity Analysis and Safety Monitoring System
Paper and Code
Oct 06, 2021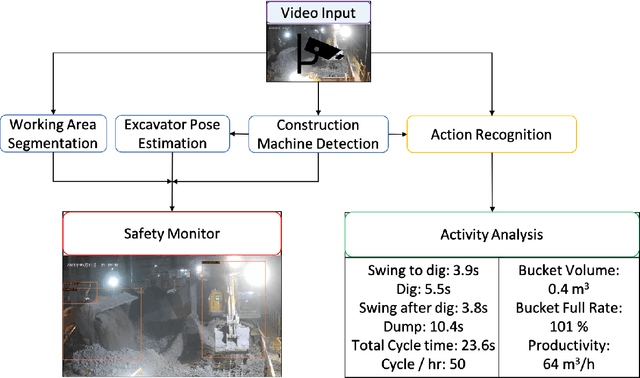
In this paper, we propose an excavator activity analysis and safety monitoring system, leveraging recent advancements in deep learning and computer vision. Our proposed system detects the surrounding environment and the excavators while estimating the poses and actions of the excavators. Compared to previous systems, our method achieves higher accuracy in object detection, pose estimation, and action recognition tasks. In addition, we build an excavator dataset using the Autonomous Excavator System (AES) on the waste disposal recycle scene to demonstrate the effectiveness of our system. We also evaluate our method on a benchmark construction dataset. The experimental results show that the proposed action recognition approach outperforms the state-of-the-art approaches on top-1 accuracy by about 5.18%.