 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision-Aided Blockage Avoidance in UAV-assisted V2X Communications
Paper and Code
Jul 26, 2022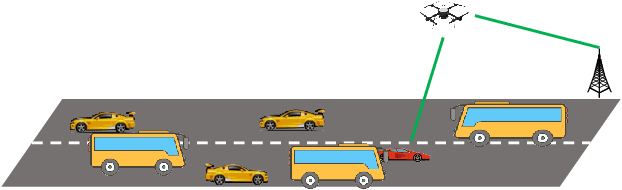
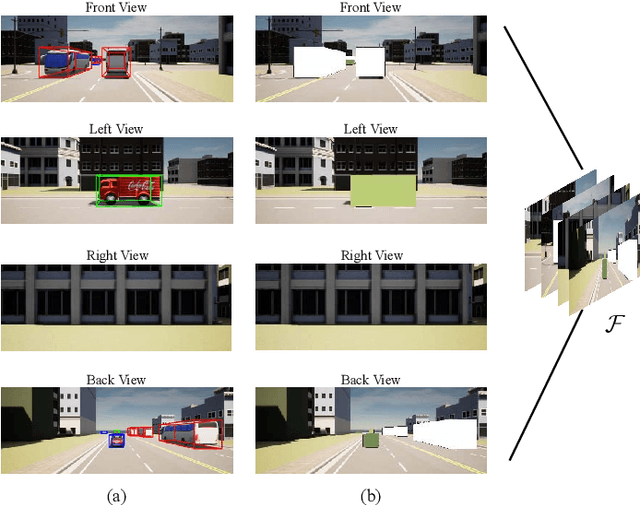
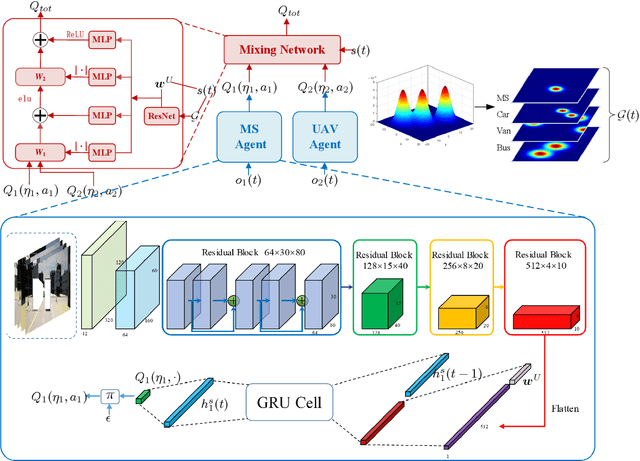
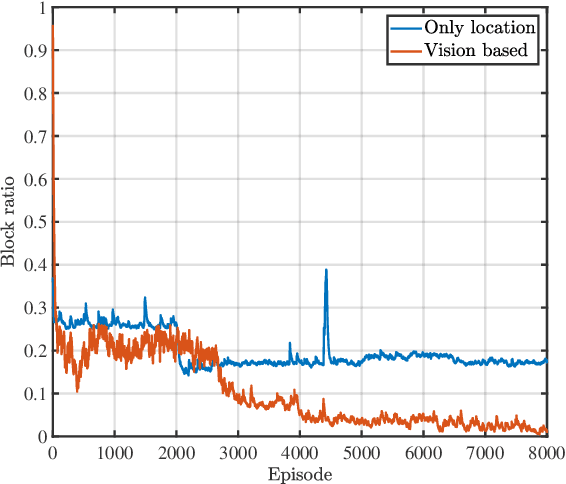
The blockage is a key challenge for millimeter wave communication systems, since these systems mainly work on line-of-sight (LOS) links, and the blockage can degrade the system performance significantly. It is recently found that visual information, easily obtained by cameras, can be utilized to extract the location and size information of the environmental objects, which can help to infer the communication parameters, such as blockage status. In this paper, we propose a novel vision-aided handover framework for UAV-assisted V2X system, which leverages the images taken by cameras at the mobile station (MS) to choose the direct link or UAV-assisted link to avoid blockage caused by the vehicles on the road. We propose a deep reinforcement learning algorithm to optimize the handover and UAV trajectory policy in order to improve the long-term throughput. Simulations results demonstrate the effectiveness of using visual information to deal with the blockage issues.