 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVirtual Constraints and Hybrid Zero Dynamics for Realizing Underactuated Bipedal Locomotion
Paper and Code
Jun 04, 2017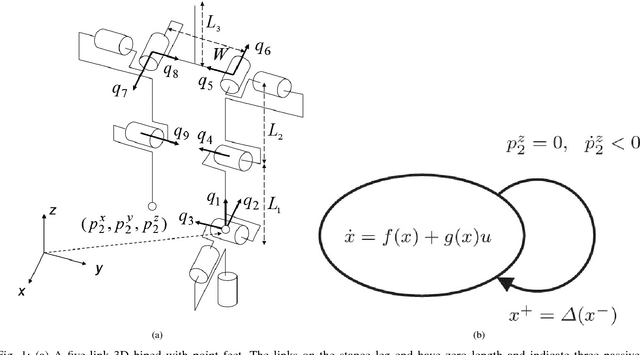



Underactuation is ubiquitous in human locomotion and should be ubiquitous in bipedal robotic locomotion as well. This chapter presents a coherent theory for the design of feedback controllers that achieve stable walking gaits in underactuated bipedal robots. Two fundamental tools are introduced, virtual constraints and hybrid zero dynamics. Virtual constraints are relations on the state variables of a mechanical model that are imposed through a time-invariant feedback controller. One of their roles is to synchronize the robot's joints to an internal gait phasing variable. A second role is to induce a low dimensional system, the zero dynamics, that captures the underactuated aspects of a robot's model, without any approximations. To enhance intuition, the relation between physical constraints and virtual constraints is first established. From here, the hybrid zero dynamics of an underactuated bipedal model is developed, and its fundamental role in the design of asymptotically stable walking motions is established. The chapter includes numerous references to robots on which the highlighted techniques have been implemented.