 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeView-Invariant Localization using Semantic Objects in Changing Environments
Paper and Code
Sep 28, 2022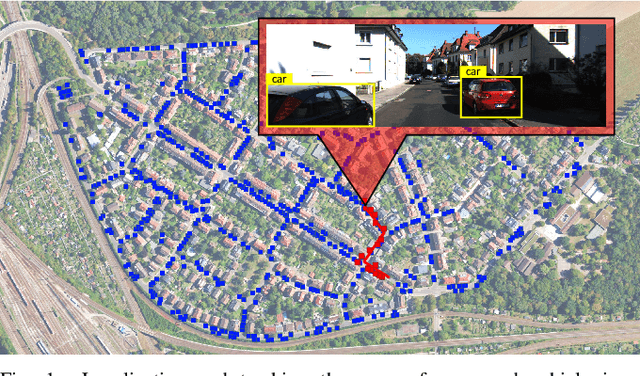
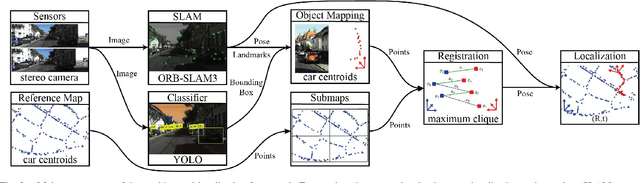
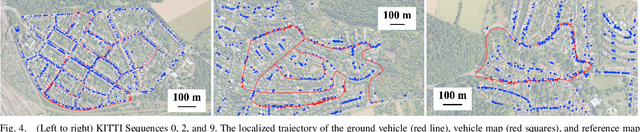
This paper proposes a novel framework for real-time localization and egomotion tracking of a vehicle in a reference map. The core idea is to map the semantic objects observed by the vehicle and register them to their corresponding objects in the reference map. While several recent works have leveraged semantic information for cross-view localization, the main contribution of this work is a view-invariant formulation that makes the approach directly applicable to any viewpoint configuration for which objects are detectable. Another distinctive feature is robustness to changes in the environment/objects due to a data association scheme suited for extreme outlier regimes (e.g., 90% association outliers). To demonstrate our framework, we consider an example of localizing a ground vehicle in a reference object map using only cars as objects. While only a stereo camera is used for the ground vehicle, we consider reference maps constructed a priori from ground viewpoints using stereo cameras and Lidar scans, and georeferenced aerial images captured at a different date to demonstrate the framework's robustness to different modalities, viewpoints, and environment changes. Evaluations on the KITTI dataset show that over a 3.7 km trajectory, localization occurs in 36 sec and is followed by real-time egomotion tracking with an average position error of 8.5 m in a Lidar reference map, and on an aerial object map where 77% of objects are outliers, localization is achieved in 71 sec with an average position error of 7.9 m.