 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVideo Summarization through Human Detection on a Social Robot
Paper and Code
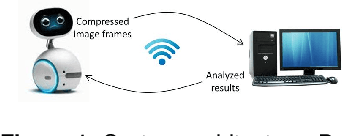
In this paper, we propose a novel video summarization system which captures images via a social robot's camera but processes images on a server. The system helps remote family members easily be aware of their seniors' daily activities via summaries. The system utilizes two vision-based algorithms, one for pose estimation and the other for human detection, to locate people in frames to guide the robot through people tracking and filter out improper frames including the ones without a person or blurred, or with a person but too small or not at the center of the frame. The system utilizes a video summarization method to select keyframes by balancing the representativeness and diversity. We conduct experiments of the system through three in-the-wild studies and evaluate the performance through human subject studies. Experimental results show that the users of the system think the system is promising and useful for their needs.