 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicular Teamwork: Collaborative localization of Autonomous Vehicles
Paper and Code


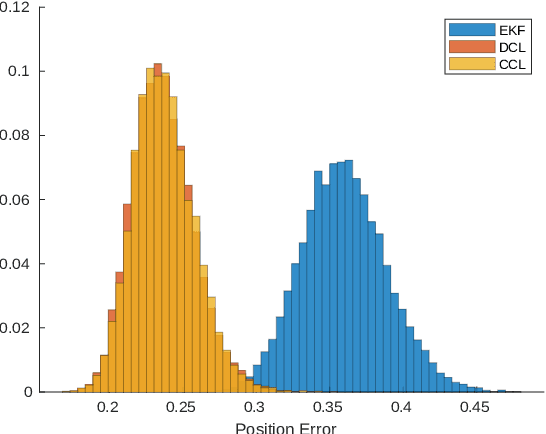

This paper develops a distributed collaborative localization algorithm based on an extended kalman filter. This algorithm incorporates Ultra-Wideband (UWB) measurements for vehicle to vehicle ranging, and shows improvements in localization accuracy where GPS typically falls short. The algorithm was first tested in a newly created open-source simulation environment that emulates various numbers of vehicles and sensors while simultaneously testing multiple localization algorithms. Predicted error distributions for various algorithms are quickly producible using the Monte-Carlo method and optimization techniques within MatLab. The simulation results were validated experimentally in an outdoor, urban environment. Improvements of localization accuracy over a typical extended kalman filter ranged from 2.9% to 9.3% over 180 meter test runs. When GPS was denied, these improvements increased up to 83.3% over a standard kalman filter. In both simulation and experimentally, the DCL algorithm was shown to be a good approximation of a full state filter, while reducing required communication between vehicles. These results are promising in showing the efficacy of adding UWB ranging sensors to cars for collaborative and landmark localization, especially in GPS-denied environments. In the future, additional moving vehicles with additional tags will be tested in other challenging GPS denied environments.