 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVehicle Local Position Estimation System
Paper and Code
Mar 23, 2015
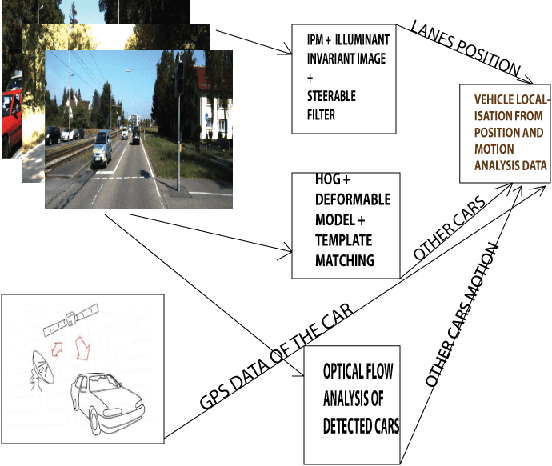
In this paper, a robust vehicle local position estimation with the help of single camera sensor and GPS is presented. A modified Inverse Perspective Mapping, illuminant Invariant techniques and object detection based approach is used to localize the vehicle in the road. Vehicles current lane, its position from road boundary and other cars are used to define its local position. For this purpose Lane markings are detected using a Laplacian edge feature, robust to shadowing. Effect of shadowing and extra sun light are removed using Lab color space and illuminant invariant techniques. Lanes are assumed to be as parabolic model and fitted using robust RANSAC. This method can reliably detect all lanes of the road, estimate lane departure angle and local position of vehicle relative to lanes, road boundary and other cars. Different type of obstacle like pedestrians, vehicles are detected using HOG feature based deformable part model.