Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVariational Inference with Mixture Model Approximation: Robotic Applications
Paper and Code
May 23, 2019

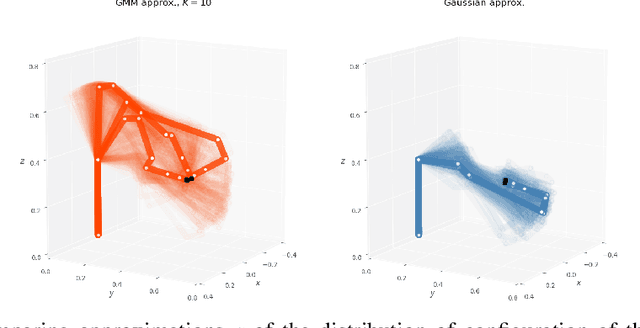
We propose a method to approximate the distribution of robot configurations satisfying multiple objectives. Our approach uses Variational Inference, a popular method in Bayesian computation, which has several advantages over sampling-based techniques. To be able to represent the complex and multimodal distribution of configurations, we propose to use a mixture model as approximate distribution, an approach that has gained popularity recently. In this work, we show the interesting properties of this approach and how it can be applied to a range of problems.
View paper on