 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeValueNetQP: Learned one-step optimal control for legged locomotion
Paper and Code
Jan 11, 2022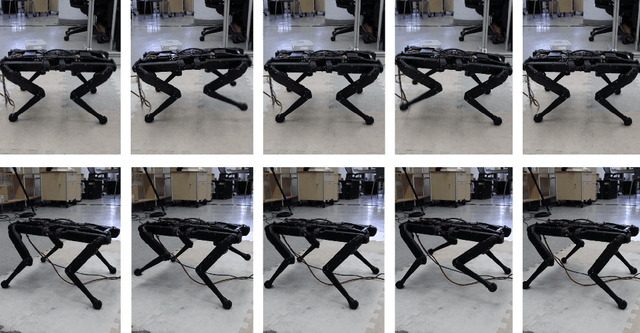
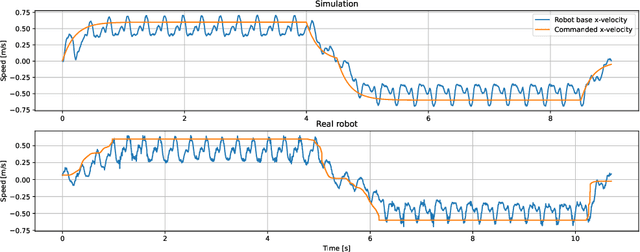
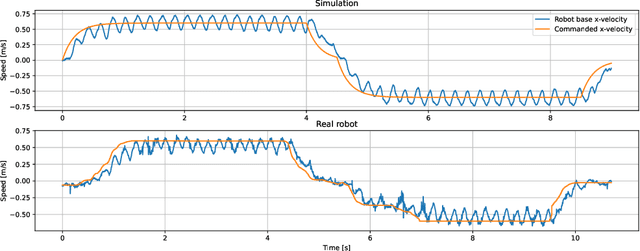
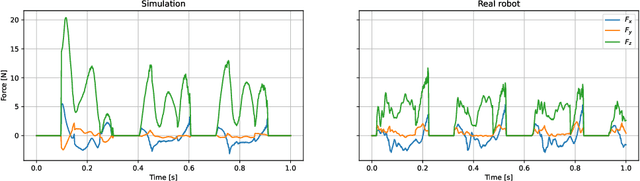
Optimal control is a successful approach to generate motions for complex robots, in particular for legged locomotion. However, these techniques are often too slow to run in real time for model predictive control or one needs to drastically simplify the dynamics model. In this work, we present a method to learn to predict the gradient and hessian of the problem value function, enabling fast resolution of the predictive control problem with a one-step quadratic program. In addition, our method is able to satisfy constraints like friction cones and unilateral constraints, which are important for high dynamics locomotion tasks. We demonstrate the capability of our method in simulation and on a real quadruped robot performing trotting and bounding motions.