 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeV2I-Calib: A Novel Calibration Approach for Collaborative Vehicle and Infrastructure LiDAR Systems
Paper and Code
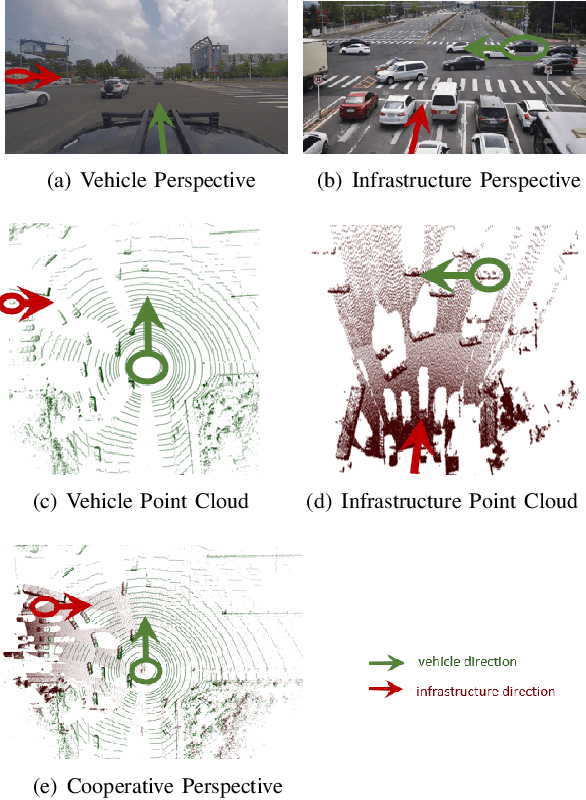
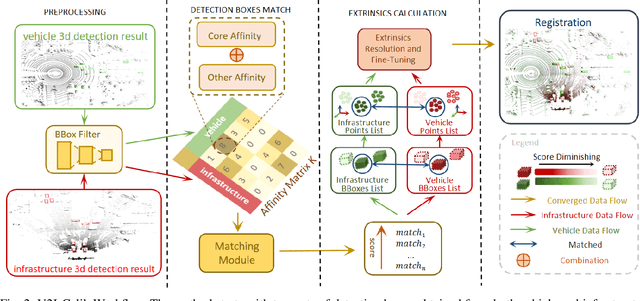
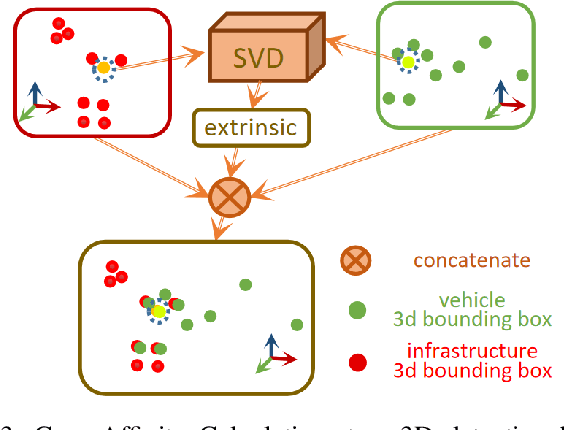
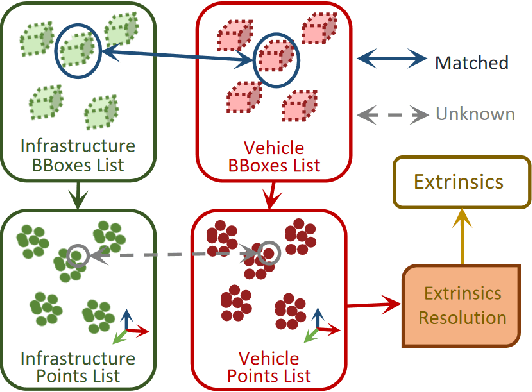
Cooperative vehicle and infrastructure LiDAR systems hold great potential, yet their implementation faces numerous challenges. Calibration of LiDAR systems across heterogeneous vehicle and infrastructure endpoints is a critical step to ensure the accuracy and consistency of perception system data, necessitating calibration methods that are real-time and stable. To this end, this paper introduces a novel calibration method for cooperative vehicle and road infrastructure LiDAR systems, which exploits spatial association information between detection boxes. The method centers around a novel Overall IoU metric that reflects the correlation of targets between vehicle and infrastructure, enabling real-time monitoring of calibration results. We search for common matching boxes between vehicle and infrastructure nodes by constructing an affinity matrix. Subsequently, these matching boxes undergo extrinsic parameter computation and optimization. Comparative and ablation experiments on the DAIR-V2X dataset confirm the superiority of our method. To better reflect the differences in calibration results, we have categorized the calibration tasks on the DAIR-V2X dataset based on their level of difficulty, enriching the dataset's utility for future research. Our project is available at https://github.com/MassimoQu/v2i-calib .