 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeV-MAO: Generative Modeling for Multi-Arm Manipulation of Articulated Objects
Paper and Code
Nov 07, 2021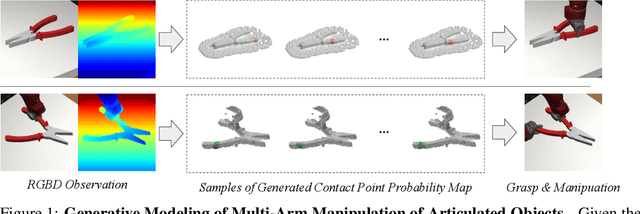
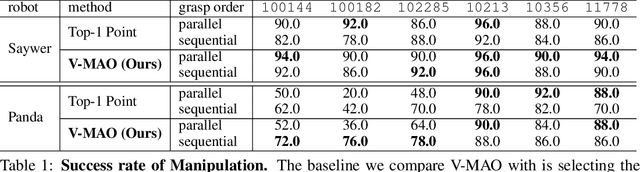
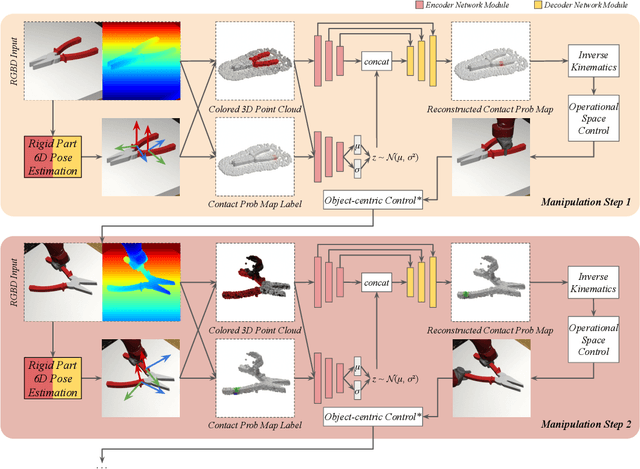

Manipulating articulated objects requires multiple robot arms in general. It is challenging to enable multiple robot arms to collaboratively complete manipulation tasks on articulated objects. In this paper, we present $\textbf{V-MAO}$, a framework for learning multi-arm manipulation of articulated objects. Our framework includes a variational generative model that learns contact point distribution over object rigid parts for each robot arm. The training signal is obtained from interaction with the simulation environment which is enabled by planning and a novel formulation of object-centric control for articulated objects. We deploy our framework in a customized MuJoCo simulation environment and demonstrate that our framework achieves a high success rate on six different objects and two different robots. We also show that generative modeling can effectively learn the contact point distribution on articulated objects.