 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing World Models for Pseudo-Rehearsal in Continual Learning
Paper and Code
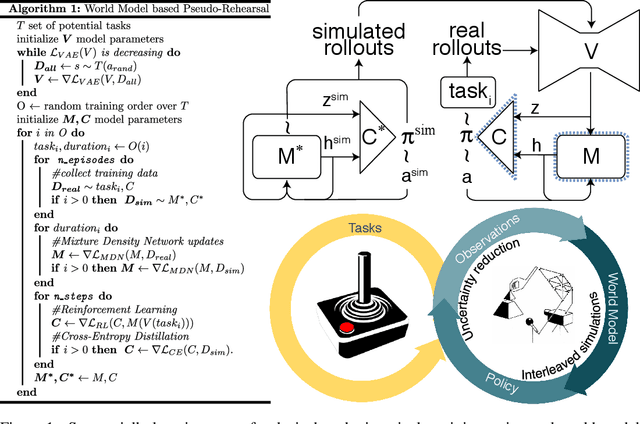
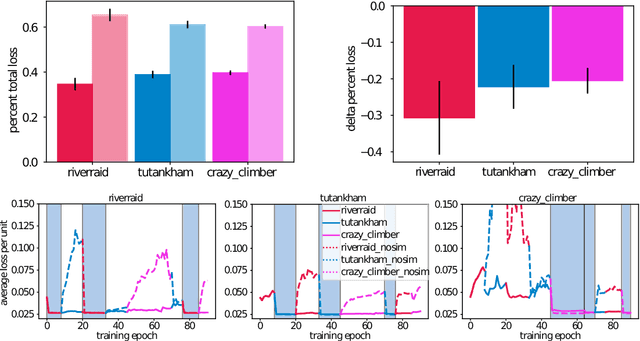
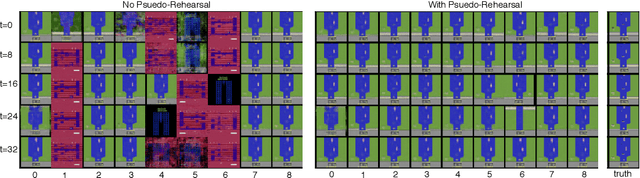
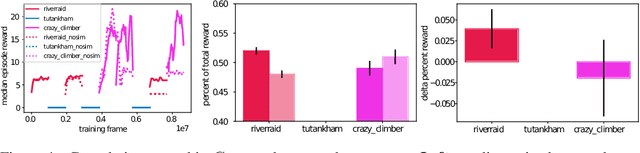
The utility of learning a dynamics/world model of the environment in reinforcement learning has been shown in a many ways. When using neural networks, however, these models suffer catastrophic forgetting when learned in a lifelong or continual fashion. Current solutions to the continual learning problem require experience to be segmented and labeled as discrete tasks, however, in continuous experience it is generally unclear what a sufficient segmentation of tasks would be. Here we propose a method to continually learn these internal world models through the interleaving of internally generated rollouts from past experiences (i.e., pseudo-rehearsal). We show this method can sequentially learn unsupervised temporal prediction, without task labels, in a disparate set of Atari games. Empirically, this interleaving of the internally generated rollouts with the external environment's observations leads to an average 4.5x reduction in temporal prediction loss compared to non-interleaved learning. Similarly, we show that the representations of this internal model remain stable across learned environments. Here, an agent trained using an initial version of the internal model can perform equally well when using a subsequent version that has successfully incorporated experience from multiple new environments.