 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Indirect Encoding of Multiple Brains to Produce Multimodal Behavior
Paper and Code
Apr 26, 2016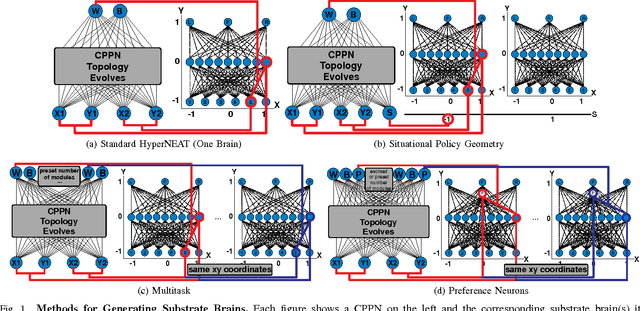
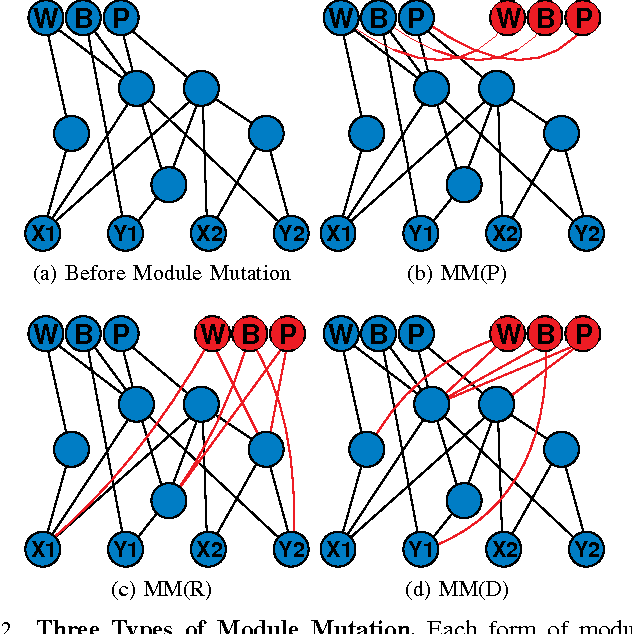

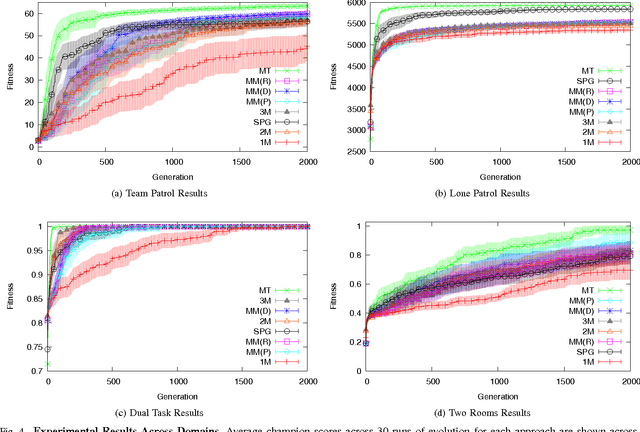
An important challenge in neuroevolution is to evolve complex neural networks with multiple modes of behavior. Indirect encodings can potentially answer this challenge. Yet in practice, indirect encodings do not yield effective multimodal controllers. Thus, this paper introduces novel multimodal extensions to HyperNEAT, a popular indirect encoding. A previous multimodal HyperNEAT approach called situational policy geometry assumes that multiple brains benefit from being embedded within an explicit geometric space. However, experiments here illustrate that this assumption unnecessarily constrains evolution, resulting in lower performance. Specifically, this paper introduces HyperNEAT extensions for evolving many brains without assuming geometric relationships between them. The resulting Multi-Brain HyperNEAT can exploit human-specified task divisions to decide when each brain controls the agent, or can automatically discover when brains should be used, by means of preference neurons. A further extension called module mutation allows evolution to discover the number of brains, enabling multimodal behavior with even less expert knowledge. Experiments in several multimodal domains highlight that multi-brain approaches are more effective than HyperNEAT without multimodal extensions, and show that brains without a geometric relation to each other outperform situational policy geometry. The conclusion is that Multi-Brain HyperNEAT provides several promising techniques for evolving complex multimodal behavior.