Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Depth for Improving Referring Expression Comprehension in Real-World Environments
Paper and Code
Jul 09, 2021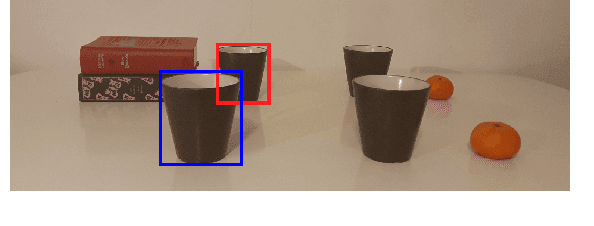
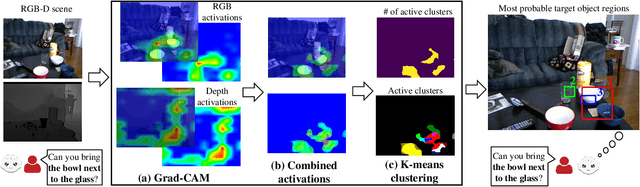
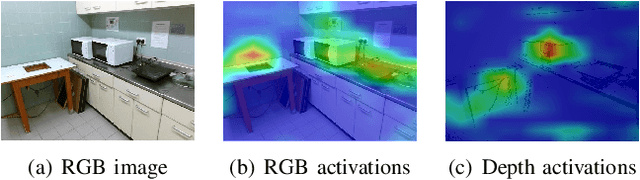
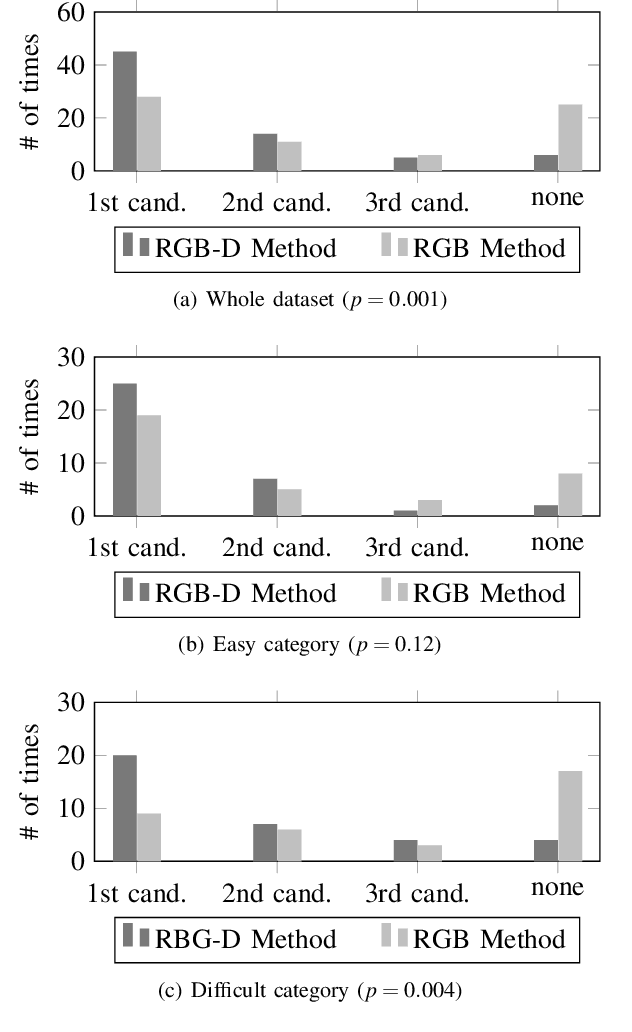
In a human-robot collaborative task where a robot helps its partner by finding described objects, the depth dimension plays a critical role in successful task completion. Existing studies have mostly focused on comprehending the object descriptions using RGB images. However, 3-dimensional space perception that includes depth information is fundamental in real-world environments. In this work, we propose a method to identify the described objects considering depth dimension data. Using depth features significantly improves performance in scenes where depth data is critical to disambiguate the objects and across our whole evaluation dataset that contains objects that can be specified with and without the depth dimension.
View paper on