 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUsing Contact to Increase Robot Performance for Glovebox D&D Tasks
Paper and Code
Jul 11, 2018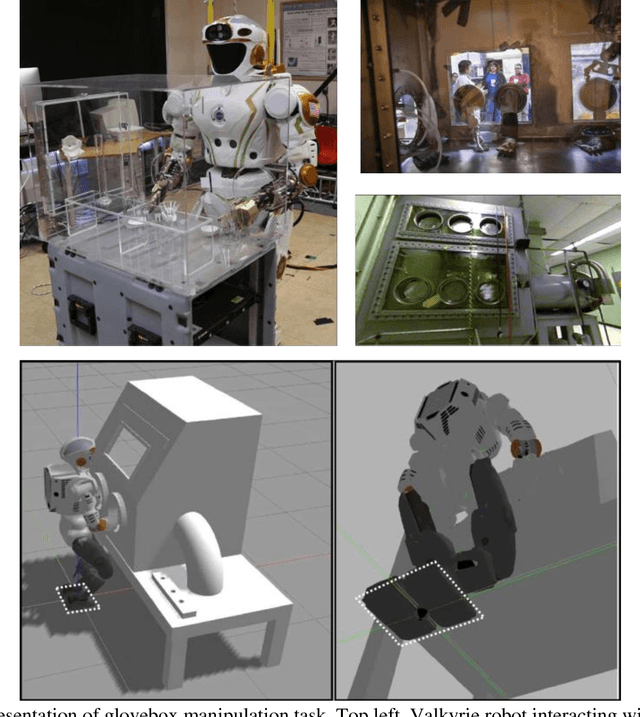
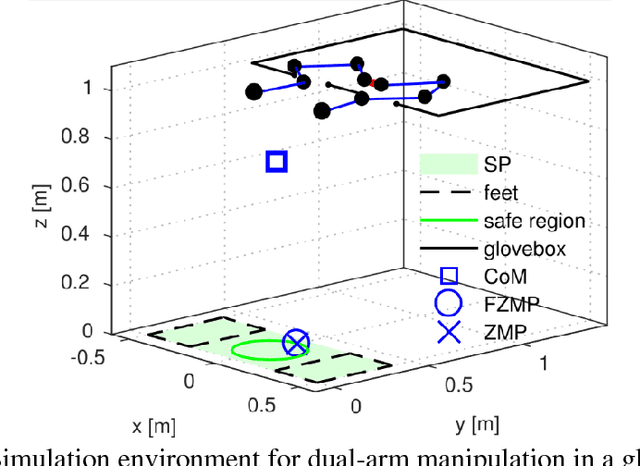
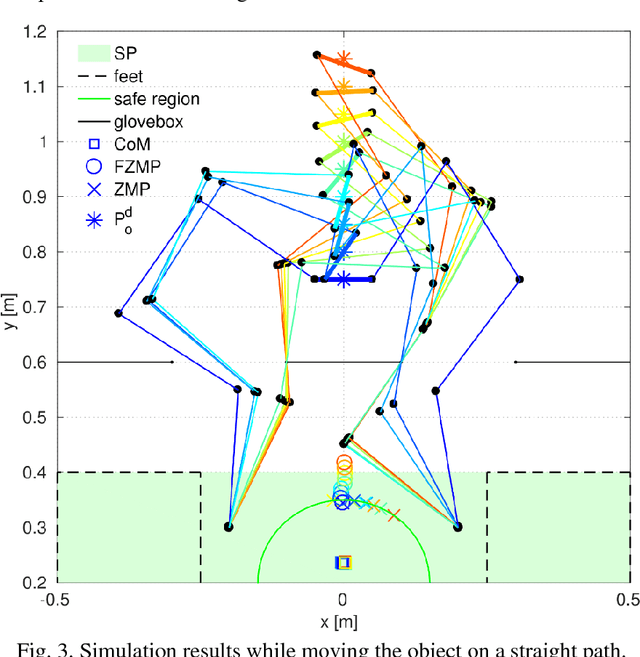
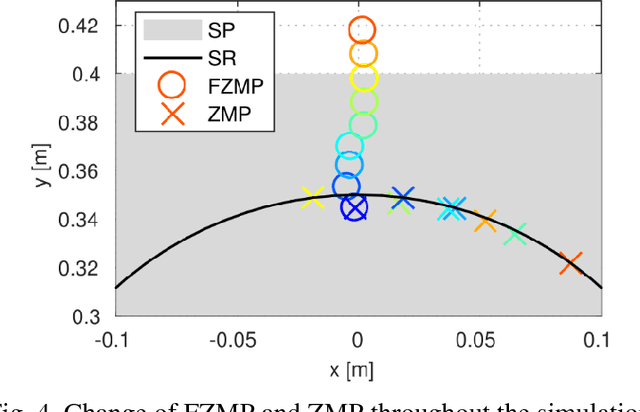
Glovebox decommissioning tasks usually require manipulating relatively heavy objects in a highly constrained environment. Thus, contact with the surroundings becomes inevitable. In order to allow the robot to interact with the environment in a natural way, we present a contact-implicit motion planning framework. This framework enables the system, without the specification in advance of a contact plan, to make and break contacts to maintain stability while performing a manipulation task. In this method, we use linear complementarity constraints to model rigid body contacts and find a locally optimal solution for joint displacements and magnitudes of support forces. Then, joint torques are calculated such that the support forces have the highest priority. We evaluate our framework in a 2.5D, quasi-static simulation in which a humanoid robot with planar arms manipulates a heavy object. Our results suggest that the proposed method provides the robot with the ability to balance itself by generating support forces on the environment while simultaneously performing the manipulation task.