 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUser-Interactive Offline Reinforcement Learning
Paper and Code
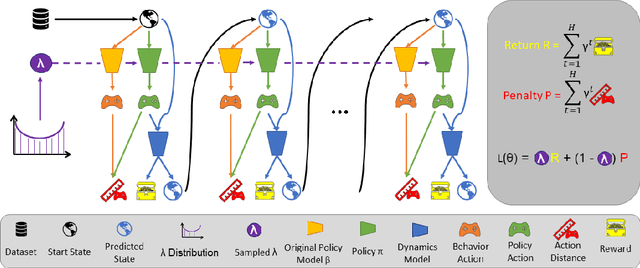



Offline reinforcement learning algorithms still lack trust in practice due to the risk that the learned policy performs worse than the original policy that generated the dataset or behaves in an unexpected way that is unfamiliar to the user. At the same time, offline RL algorithms are not able to tune their most important hyperparameter - the proximity of the learned policy to the original policy. We propose an algorithm that allows the user to tune this hyperparameter at runtime, thereby overcoming both of the above mentioned issues simultaneously. This allows users to start with the original behavior and grant successively greater deviation, as well as stopping at any time when the policy deteriorates or the behavior is too far from the familiar one.