Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUrban Drone Navigation: Autoencoder Learning Fusion for Aerodynamics
Paper and Code
Oct 13, 2023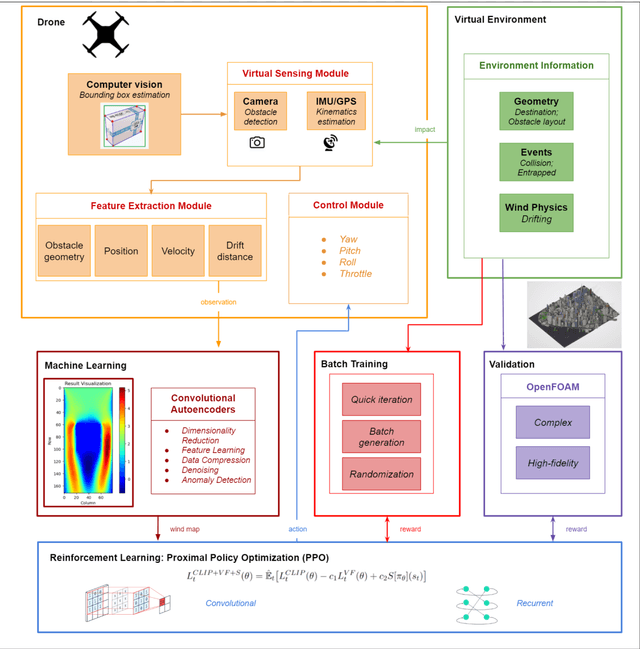
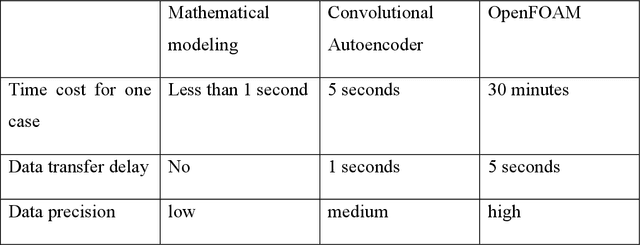
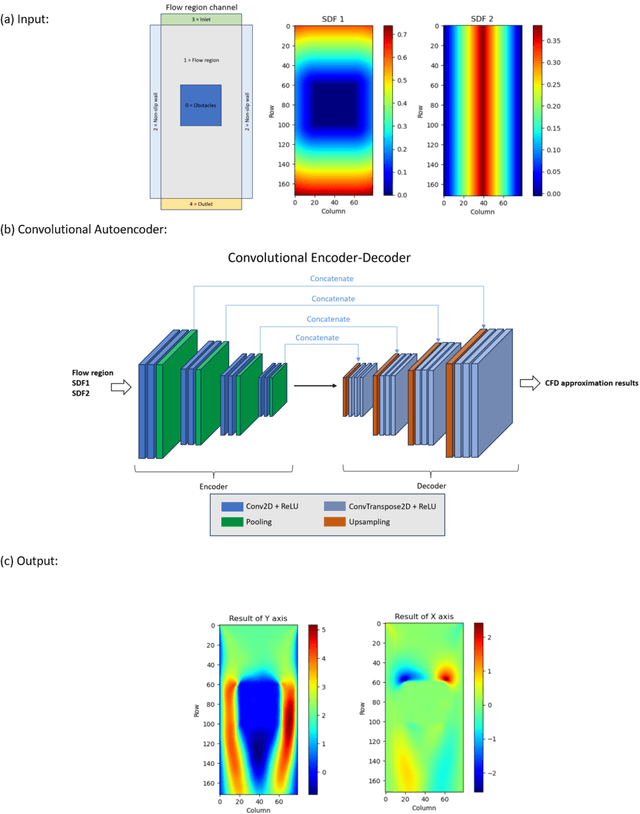
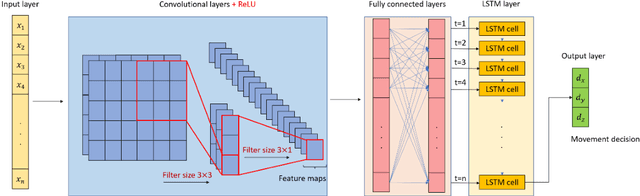
Drones are vital for urban emergency search and rescue (SAR) due to the challenges of navigating dynamic environments with obstacles like buildings and wind. This paper presents a method that combines multi-objective reinforcement learning (MORL) with a convolutional autoencoder to improve drone navigation in urban SAR. The approach uses MORL to achieve multiple goals and the autoencoder for cost-effective wind simulations. By utilizing imagery data of urban layouts, the drone can autonomously make navigation decisions, optimize paths, and counteract wind effects without traditional sensors. Tested on a New York City model, this method enhances drone SAR operations in complex urban settings.
* 47 pages
View paper on