 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Traffic Scene Generation with Synthetic 3D Scene Graphs
Paper and Code
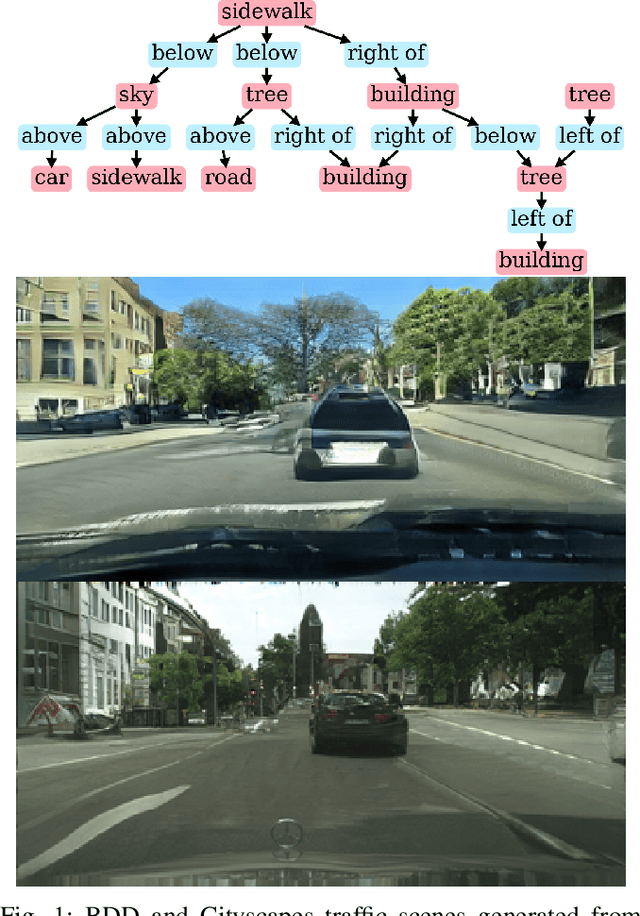
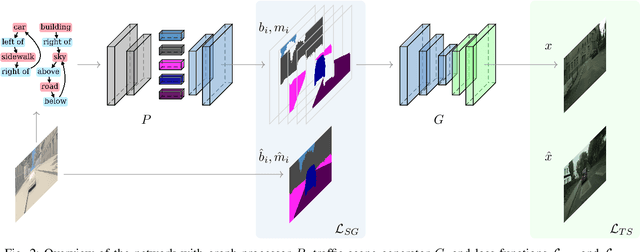
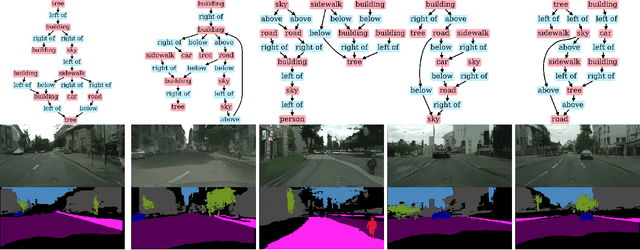

Image synthesis driven by computer graphics achieved recently a remarkable realism, yet synthetic image data generated this way reveals a significant domain gap with respect to real-world data. This is especially true in autonomous driving scenarios, which represent a critical aspect for overcoming utilizing synthetic data for training neural networks. We propose a method based on domain-invariant scene representation to directly synthesize traffic scene imagery without rendering. Specifically, we rely on synthetic scene graphs as our internal representation and introduce an unsupervised neural network architecture for realistic traffic scene synthesis. We enhance synthetic scene graphs with spatial information about the scene and demonstrate the effectiveness of our approach through scene manipulation.