 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised Shape and Pose Disentanglement for 3D Meshes
Paper and Code


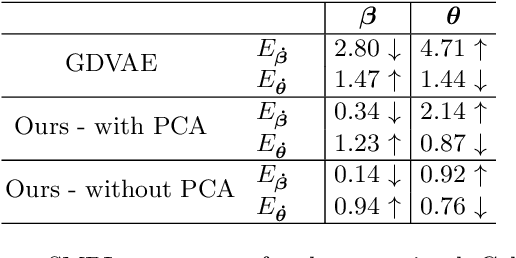
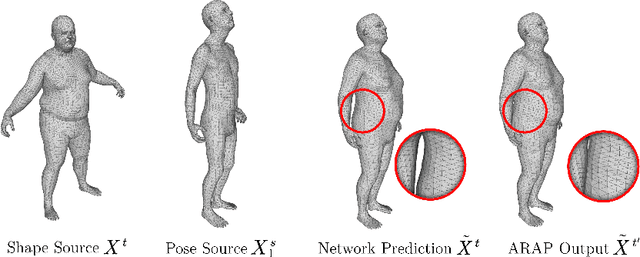
Parametric models of humans, faces, hands and animals have been widely used for a range of tasks such as image-based reconstruction, shape correspondence estimation, and animation. Their key strength is the ability to factor surface variations into shape and pose dependent components. Learning such models requires lots of expert knowledge and hand-defined object-specific constraints, making the learning approach unscalable to novel objects. In this paper, we present a simple yet effective approach to learn disentangled shape and pose representations in an unsupervised setting. We use a combination of self-consistency and cross-consistency constraints to learn pose and shape space from registered meshes. We additionally incorporate as-rigid-as-possible deformation(ARAP) into the training loop to avoid degenerate solutions. We demonstrate the usefulness of learned representations through a number of tasks including pose transfer and shape retrieval. The experiments on datasets of 3D humans, faces, hands and animals demonstrate the generality of our approach. Code is made available at https://virtualhumans.mpi-inf.mpg.de/unsup_shape_pose/.