 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised robotic sorting: Towards autonomous decision making robots
Paper and Code
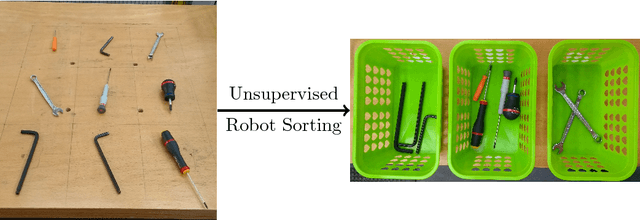
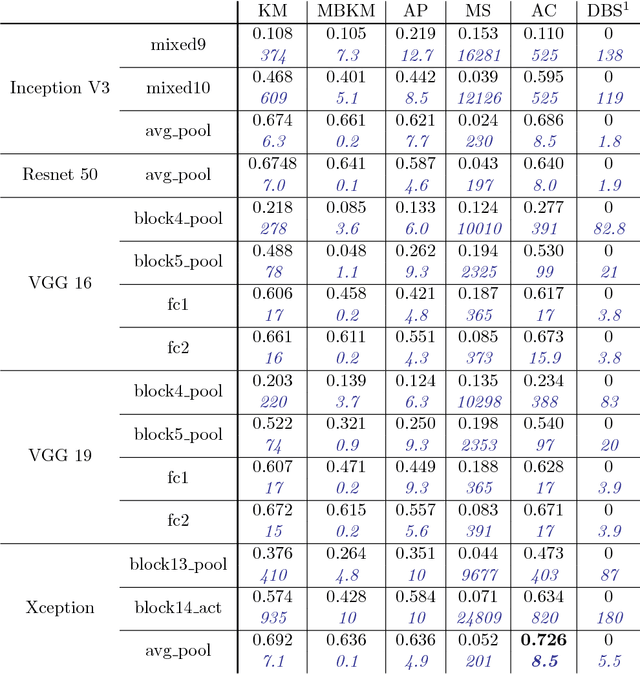

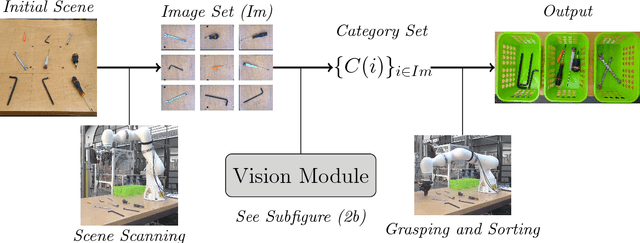
Autonomous sorting is a crucial task in industrial robotics which can be very challenging depending on the expected amount of automation. Usually, to decide where to sort an object, the system needs to solve either an instance retrieval (known object) or a supervised classification (predefined set of classes) problem. In this paper, we introduce a new decision making module, where the robotic system chooses how to sort the objects in an unsupervised way. We call this problem Unsupervised Robotic Sorting (URS) and propose an implementation on an industrial robotic system, using deep CNN feature extraction and standard clustering algorithms. We carry out extensive experiments on various standard datasets to demonstrate the efficiency of the proposed image clustering pipeline. To evaluate the robustness of our URS implementation, we also introduce a complex real world dataset containing images of objects under various background and lighting conditions. This dataset is used to fine tune the design choices (CNN and clustering algorithm) for URS. Finally, we propose a method combining our pipeline with ensemble clustering to use multiple images of each object. This redundancy of information about the objects is shown to increase the clustering results.