 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised learning of object frames by dense equivariant image labelling
Paper and Code
Nov 18, 2017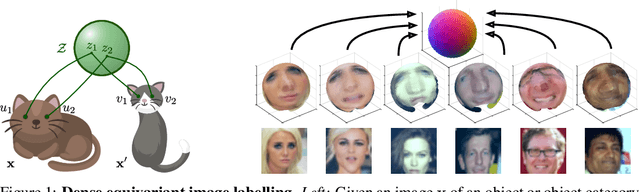

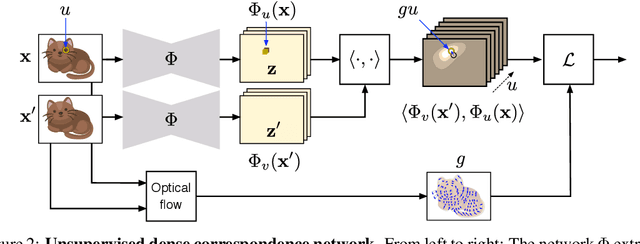
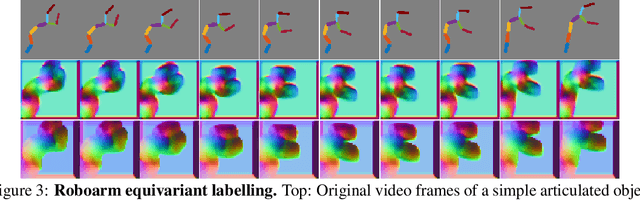
One of the key challenges of visual perception is to extract abstract models of 3D objects and object categories from visual measurements, which are affected by complex nuisance factors such as viewpoint, occlusion, motion, and deformations. Starting from the recent idea of viewpoint factorization, we propose a new approach that, given a large number of images of an object and no other supervision, can extract a dense object-centric coordinate frame. This coordinate frame is invariant to deformations of the images and comes with a dense equivariant labelling neural network that can map image pixels to their corresponding object coordinates. We demonstrate the applicability of this method to simple articulated objects and deformable objects such as human faces, learning embeddings from random synthetic transformations or optical flow correspondences, all without any manual supervision.