 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnsupervised learning of features and object boundaries from local prediction
Paper and Code
May 27, 2022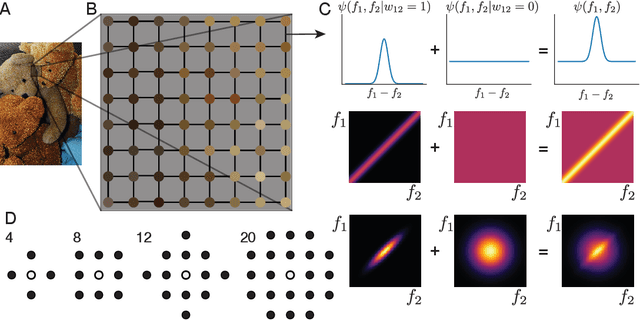
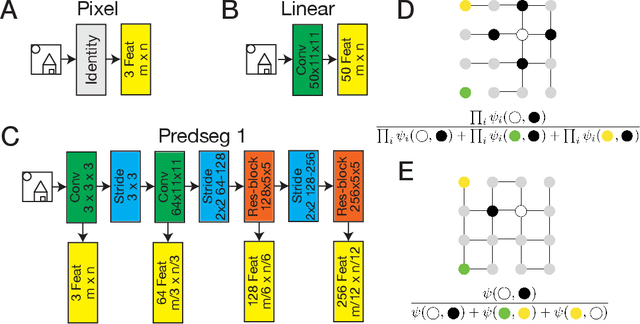
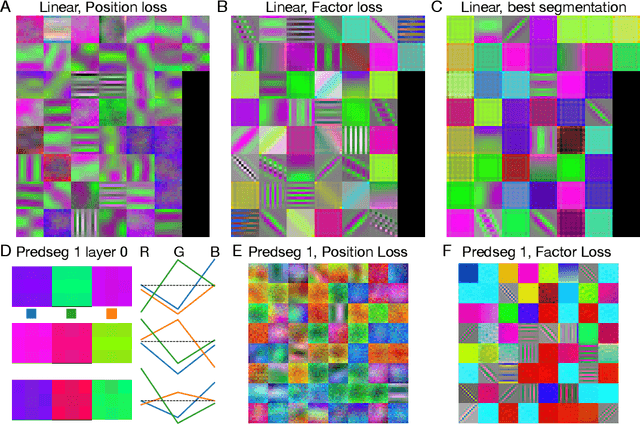
A visual system has to learn both which features to extract from images and how to group locations into (proto-)objects. Those two aspects are usually dealt with separately, although predictability is discussed as a cue for both. To incorporate features and boundaries into the same model, we model a layer of feature maps with a pairwise Markov random field model in which each factor is paired with an additional binary variable, which switches the factor on or off. Using one of two contrastive learning objectives, we can learn both the features and the parameters of the Markov random field factors from images without further supervision signals. The features learned by shallow neural networks based on this loss are local averages, opponent colors, and Gabor-like stripe patterns. Furthermore, we can infer connectivity between locations by inferring the switch variables. Contours inferred from this connectivity perform quite well on the Berkeley segmentation database (BSDS500) without any training on contours. Thus, computing predictions across space aids both segmentation and feature learning, and models trained to optimize these predictions show similarities to the human visual system. We speculate that retinotopic visual cortex might implement such predictions over space through lateral connections.