Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniqueness domains and non singular assembly mode changing trajectories
Paper and Code
Apr 05, 2011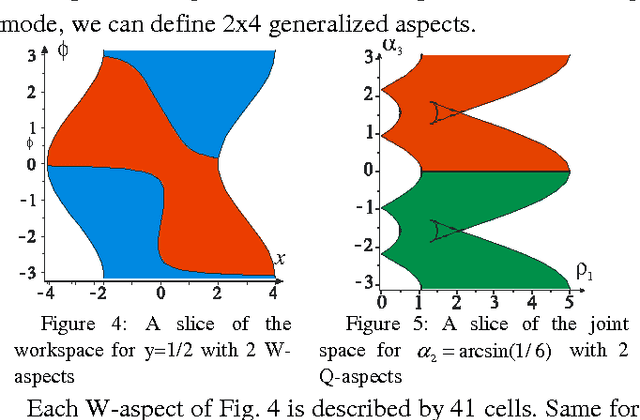
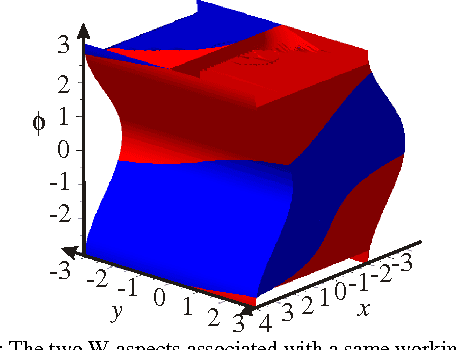
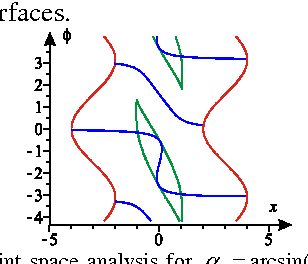
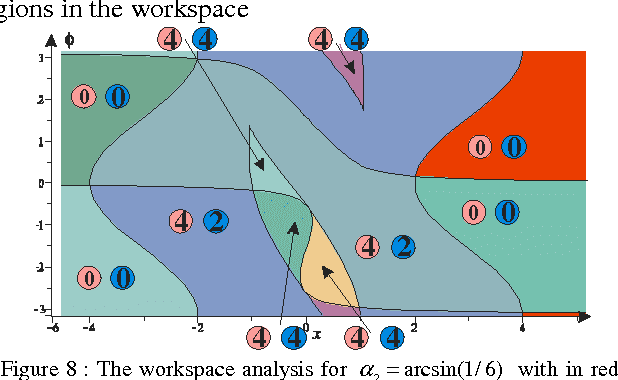
Parallel robots admit generally several solutions to the direct kinematics problem. The aspects are associated with the maximal singularity free domains without any singular configurations. Inside these regions, some trajectories are possible between two solutions of the direct kinematic problem without meeting any type of singularity: non-singular assembly mode trajectories. An established condition for such trajectories is to have cusp points inside the joint space that must be encircled. This paper presents an approach based on the notion of uniqueness domains to explain this behaviour.
* International Conference on Robotics and Automation, Shanghai :
China (2011)
View paper on