Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnifying back-propagation and forward-forward algorithms through model predictive control
Paper and Code
Sep 29, 2024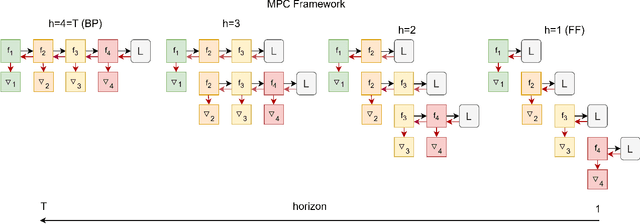
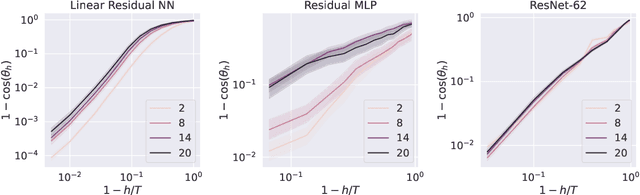
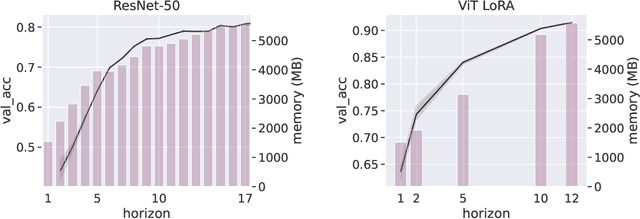
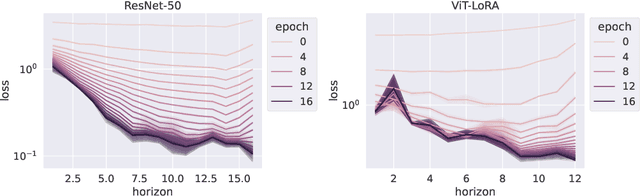
We introduce a Model Predictive Control (MPC) framework for training deep neural networks, systematically unifying the Back-Propagation (BP) and Forward-Forward (FF) algorithms. At the same time, it gives rise to a range of intermediate training algorithms with varying look-forward horizons, leading to a performance-efficiency trade-off. We perform a precise analysis of this trade-off on a deep linear network, where the qualitative conclusions carry over to general networks. Based on our analysis, we propose a principled method to choose the optimization horizon based on given objectives and model specifications. Numerical results on various models and tasks demonstrate the versatility of our method.
View paper on