 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUnderstanding Tool Discovery and Tool Innovation Using Active Inference
Paper and Code

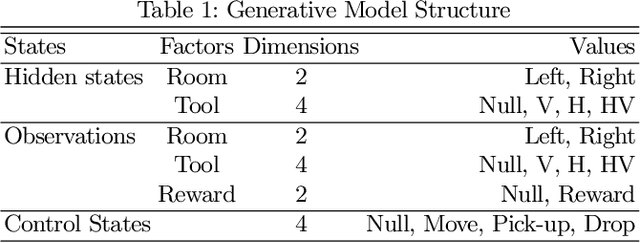
The ability to invent new tools has been identified as an important facet of our ability as a species to problem solve in dynamic and novel environments. While the use of tools by artificial agents presents a challenging task and has been widely identified as a key goal in the field of autonomous robotics, far less research has tackled the invention of new tools by agents. In this paper, (1) we articulate the distinction between tool discovery and tool innovation by providing a minimal description of the two concepts under the formalism of active inference. We then (2) apply this description to construct a toy model of tool innovation by introducing the notion of tool affordances into the hidden states of the agent's probabilistic generative model. This particular state factorisation facilitates the ability to not just discover tools but invent them through the offline induction of an appropriate tool property. We discuss the implications of these preliminary results and outline future directions of research.