Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty Estimation of Dense Optical-Flow for Robust Visual Navigation
Paper and Code
Sep 30, 2021
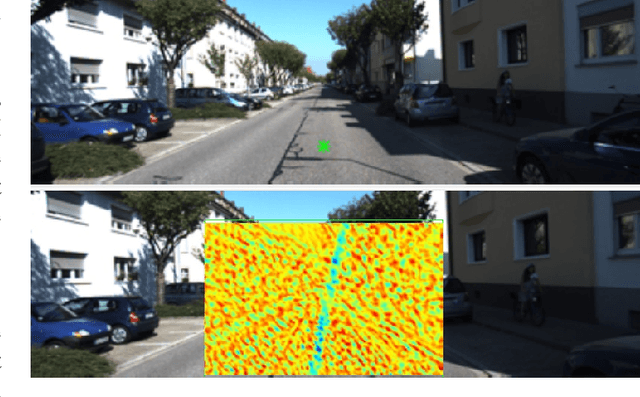

This paper presents a novel dense optical-flow algorithm to solve the monocular simultaneous localization and mapping (SLAM) problem for ground or aerial robots. Dense optical flow can effectively provide the ego-motion of the vehicle while enabling collision avoidance with the potential obstacles. Existing work has not fully utilized the uncertainty of the optical flow -- at most an isotropic Gaussian density model. We estimate the full uncertainty of the optical flow and propose a new eight-point algorithm based on the statistical Mahalanobis distance. Combined with the pose-graph optimization, the proposed method demonstrates enhanced robustness and accuracy for the public autonomous car dataset (KITTI) and aerial monocular dataset.
View paper on