 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUET-Headpose: A sensor-based top-view head pose dataset
Paper and Code
Nov 13, 2021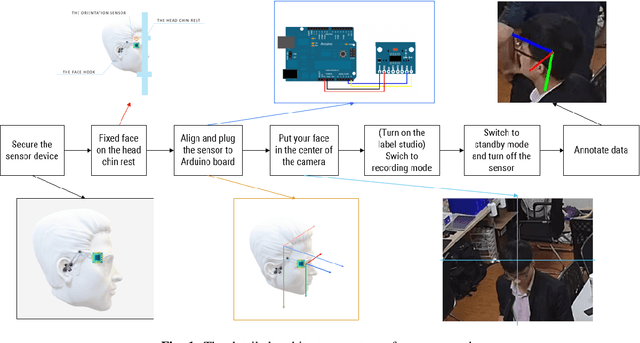
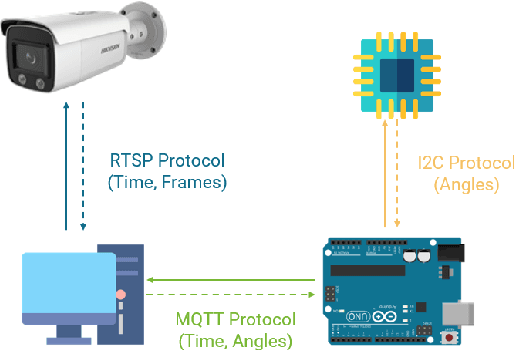
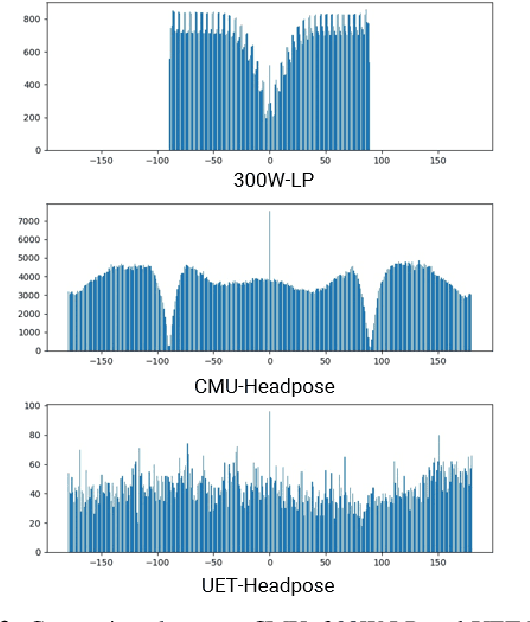
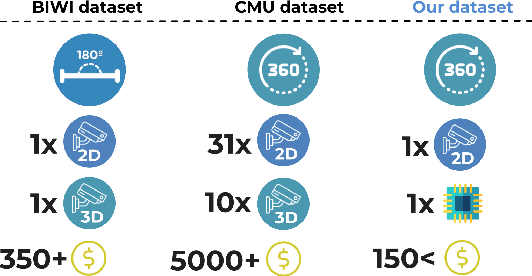
Head pose estimation is a challenging task that aims to solve problems related to predicting three dimensions vector, that serves for many applications in human-robot interaction or customer behavior. Previous researches have proposed some precise methods for collecting head pose data. But those methods require either expensive devices like depth cameras or complex laboratory environment setup. In this research, we introduce a new approach with efficient cost and easy setup to collecting head pose images, namely UET-Headpose dataset, with top-view head pose data. This method uses an absolute orientation sensor instead of Depth cameras to be set up quickly and small cost but still ensure good results. Through experiments, our dataset has been shown the difference between its distribution and available dataset like CMU Panoptic Dataset \cite{CMU}. Besides using the UET-Headpose dataset and other head pose datasets, we also introduce the full-range model called FSANet-Wide, which significantly outperforms head pose estimation results by the UET-Headpose dataset, especially on top-view images. Also, this model is very lightweight and takes small size images.