Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTwo-way Deconfounder for Off-policy Evaluation in Causal Reinforcement Learning
Paper and Code
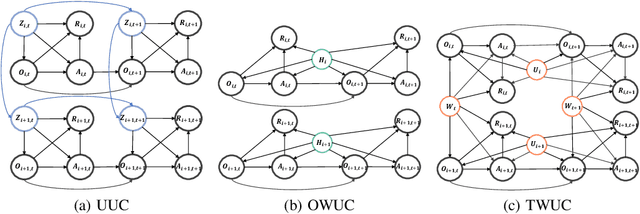
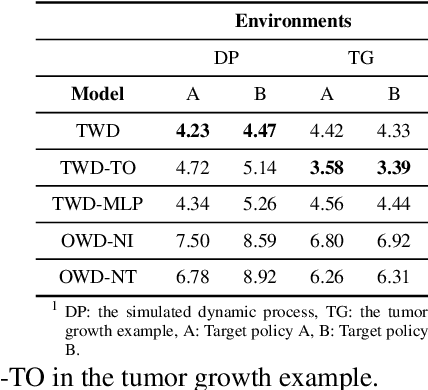
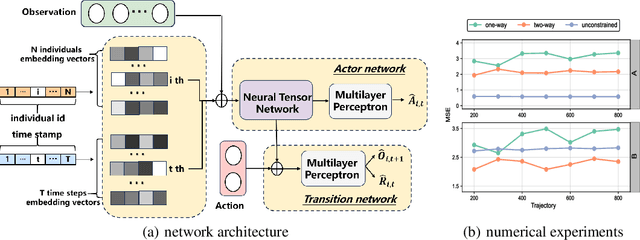
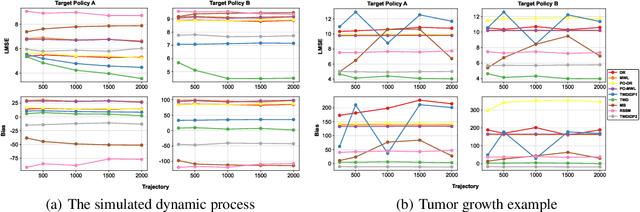
This paper studies off-policy evaluation (OPE) in the presence of unmeasured confounders. Inspired by the two-way fixed effects regression model widely used in the panel data literature, we propose a two-way unmeasured confounding assumption to model the system dynamics in causal reinforcement learning and develop a two-way deconfounder algorithm that devises a neural tensor network to simultaneously learn both the unmeasured confounders and the system dynamics, based on which a model-based estimator can be constructed for consistent policy value estimation. We illustrate the effectiveness of the proposed estimator through theoretical results and numerical experiments.
View paper on