 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTwice regularized MDPs and the equivalence between robustness and regularization
Paper and Code
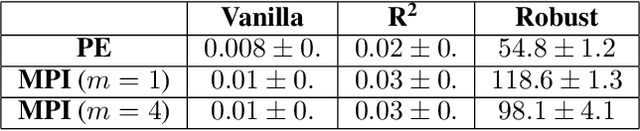
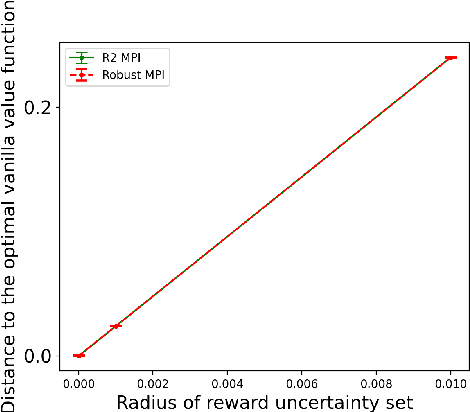
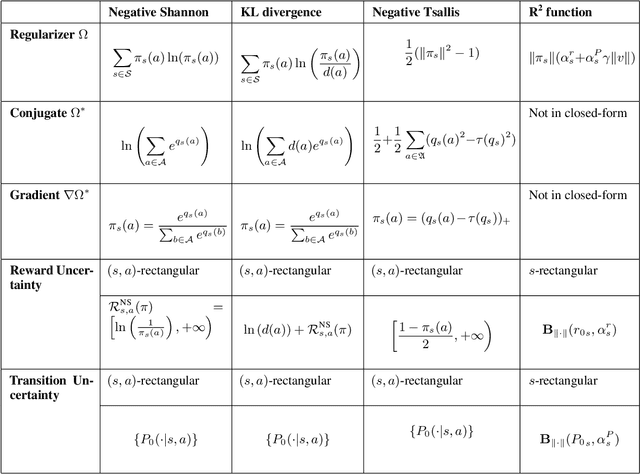

Robust Markov decision processes (MDPs) aim to handle changing or partially known system dynamics. To solve them, one typically resorts to robust optimization methods. However, this significantly increases computational complexity and limits scalability in both learning and planning. On the other hand, regularized MDPs show more stability in policy learning without impairing time complexity. Yet, they generally do not encompass uncertainty in the model dynamics. In this work, we aim to learn robust MDPs using regularization. We first show that regularized MDPs are a particular instance of robust MDPs with uncertain reward. We thus establish that policy iteration on reward-robust MDPs can have the same time complexity as on regularized MDPs. We further extend this relationship to MDPs with uncertain transitions: this leads to a regularization term with an additional dependence on the value function. We finally generalize regularized MDPs to twice regularized MDPs (R${}^2$ MDPs), i.e., MDPs with $\textit{both}$ value and policy regularization. The corresponding Bellman operators enable developing policy iteration schemes with convergence and robustness guarantees. It also reduces planning and learning in robust MDPs to regularized MDPs.