 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTustin neural networks: a class of recurrent nets for adaptive MPC of mechanical systems
Paper and Code
Nov 04, 2019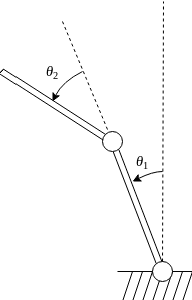
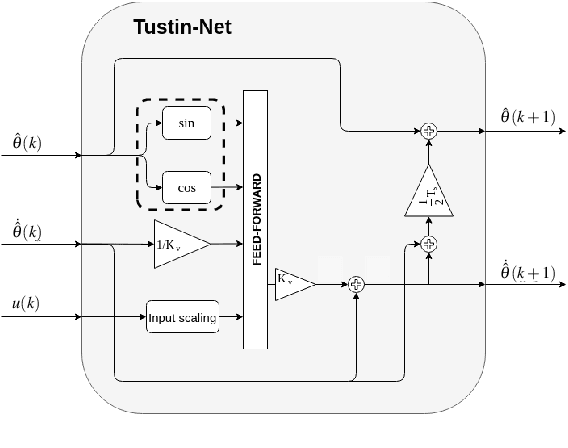

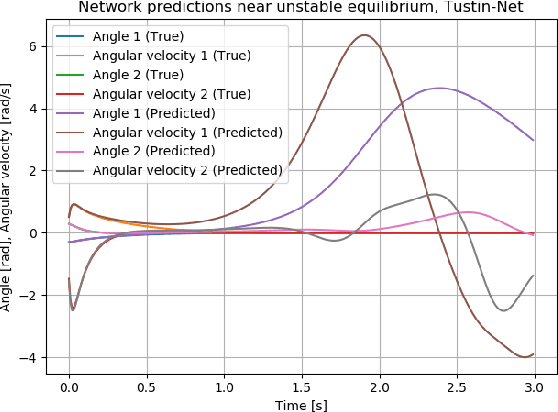
The use of recurrent neural networks to represent the dynamics of unstable systems is difficult due to the need to properly initialize their internal states, which in most of the cases do not have any physical meaning, consequent to the non-smoothness of the optimization problem. For this reason, in this paper focus is placed on mechanical systems characterized by a number of degrees of freedom, each one represented by two states, namely position and velocity. For these systems, a new recurrent neural network is proposed: Tustin-Net. Inspired by second-order dynamics, the network hidden states can be straightforwardly estimated, as their differential relationships with the measured states are hardcoded in the forward pass. The proposed structure is used to model a double inverted pendulum and for model-based Reinforcement Learning, where an adaptive Model Predictive Controller scheme using the Unscented Kalman Filter is proposed to deal with parameter changes in the system.