 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTuning-Free Contact-Implicit Trajectory Optimization
Paper and Code
Jun 11, 2020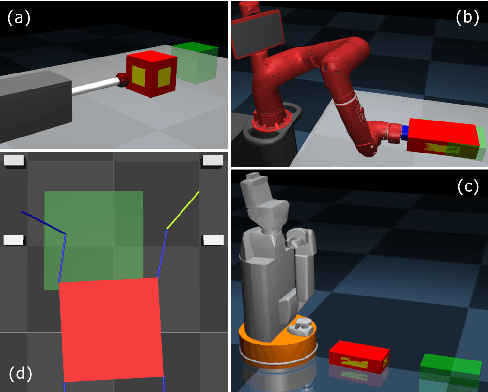
We present a contact-implicit trajectory optimization framework that can plan contact-interaction trajectories for different robot architectures and tasks using a trivial initial guess and without requiring any parameter tuning. This is achieved by using a relaxed contact model along with an automatic penalty adjustment loop for suppressing the relaxation. Moreover, the structure of the problem enables us to exploit the contact information implied by the use of relaxation in the previous iteration, such that the solution is explicitly improved with little computational overhead. We test the proposed approach in simulation experiments for non-prehensile manipulation using a 7-DOF arm and a mobile robot and for planar locomotion using a humanoid-like robot in zero gravity. The results demonstrate that our method provides an out-of-the-box solution with good performance for a wide range of applications.