 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrusted Confidence Bounds for Learning Enabled Cyber-Physical Systems
Paper and Code
Mar 11, 2020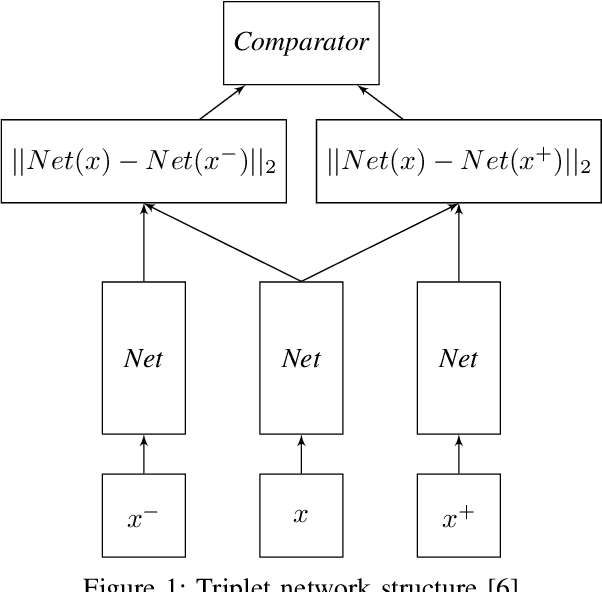
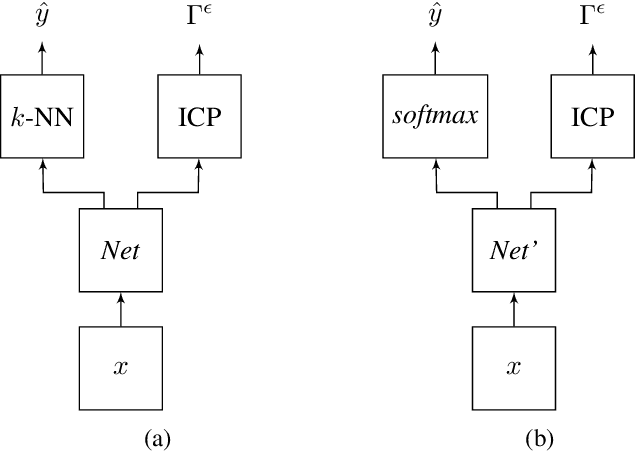
Cyber-physical systems (CPS) can benefit by the use of learning enabled components (LECs) such as deep neural networks (DNNs) for perception and desicion making tasks. However, DNNs are typically non-transparent making reasoning about their predictions very difficult, and hence their application to safety-critical systems is very challenging. LECs could be integrated easier into CPS if their predictions could be complemented with a confidence measure that quantifies how much we trust their output. The paper presents an approach for computing confidence bounds based on Inductive Conformal Prediction (ICP). We train a Triplet Network architecture to learn representations of the input data that can be used to estimate the similarity between test examples and examples in the training data set. Then, these representations are used to estimate the confidence of a set predictor based on the DNN architecture used in the triplet based on ICP. The approach is evaluated using a robotic navigation benchmark and the results show that we can computed trusted confidence bounds efficiently in real-time.