 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrust Repairing for Human-Swarm Cooperation inDynamic Task Response
Paper and Code
Feb 18, 2020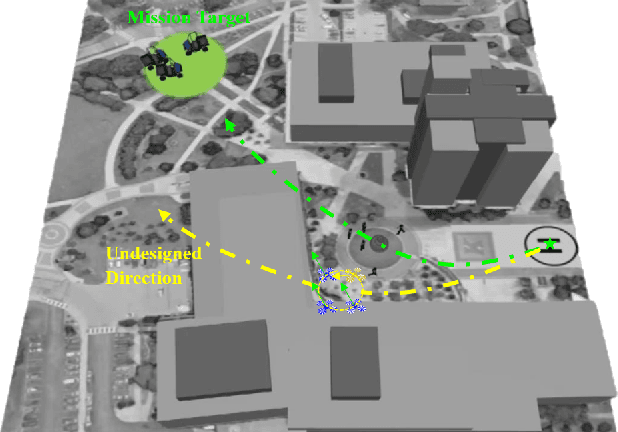
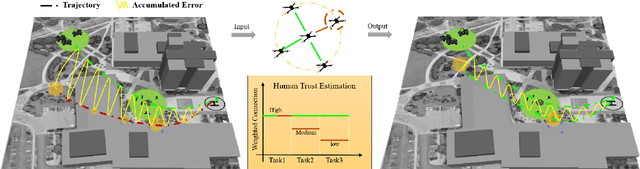
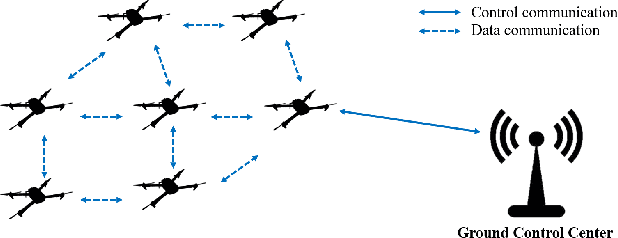
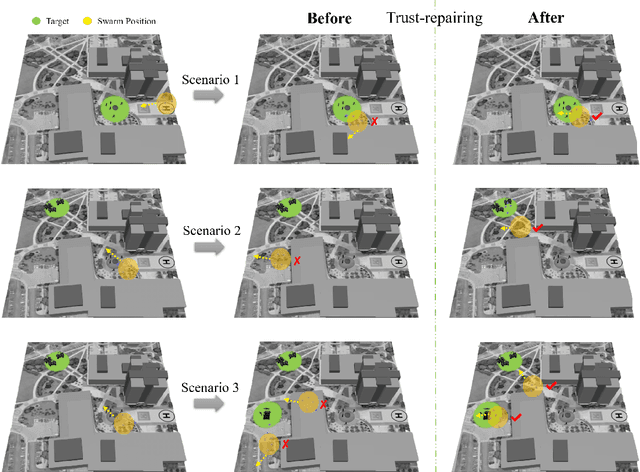
Emergency happens in human-UAV cooperation, such as criminal activity tracking and urgent needs for ground assistance. Emergency response usually has high requirements on the motion control of the multi-UAV system, by maintaining both the team performance and team behaviors. However When a UAV swarm executes tasks in a real-world environment, because of real-world factors, such as system reliability and environmental disturbances, some robots in the swarm will behave abnormally, such as slow flocking speed, wrong heading direction, or poor spatial relations. In the meanwhile, incorrect trust between human and UAV swarm could map the abnormal behavior of faulty robot to the whole swarm and request a time-consuming intervention from human supervisor, damage the UAV swarm response for a dynamic task, even evolve to a failure of task because of accumulated error. To correct reflect the trust between humans and UAV swarm and rebuild the trust to improve the performance caused by incorrect trust. We propose a dynamic trust repair model. The dynamic trust model focus on human-supervisory UAV system which can help UAV swarm to reduce the negative influence from faulty UAV on the performance of the UAV swarm, get a flexible reaction and stable human-supervisory UAV task performance. Results show that trust model could improve the performance of the swarm for dynamic task response and regain human trust.