 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrunk Pitch Oscillations to Improve Energetics in Bipedal Running Birds and Robots
Paper and Code
Sep 20, 2019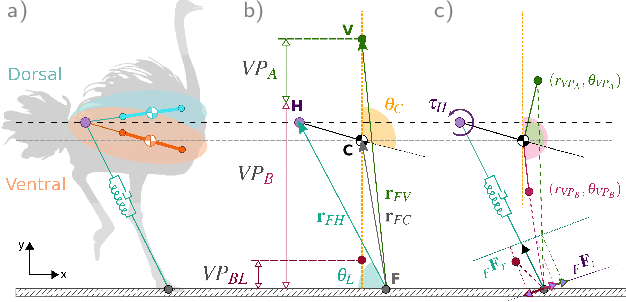
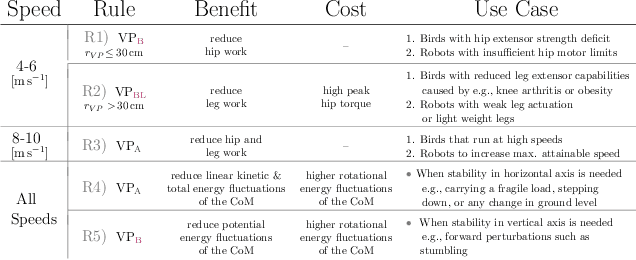
Bipedal animals have diverse morphologies and advanced locomotion abilities. Terrestrial birds in particular, display agile, efficient, and robust running motion, in which they exploit the interplay between the body segment masses and moment of inertias. On the other hand, most legged robots are not able to generate such versatile and energy efficient motion and often disregard trunk movements as a means to enhance their locomotion capabilities. Recent research investigated how trunk motions affect the gait characteristics of humans, but there is a lack of analysis across different bipedal morphologies. To address this issue, we analyze avian running based on a spring-loaded inverted pendulum model with a pronograde (horizontal) trunk. We use a virtual point based control scheme and modify the alignment of the ground reaction forces to assess how our control strategy influences the trunk pitch oscillations and energetics of the locomotion. We derive three potential key strategies to leverage trunk pitch motions that minimize either the energy fluctuations of the center of mass or the work performed by the hip and leg. We show that these strategies are also valid for human-like trunks, and could be used in legged robotics.