 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTree Morphology for Phenotyping from Semantics-Based Mapping in Orchard Environments
Paper and Code
Apr 16, 2018
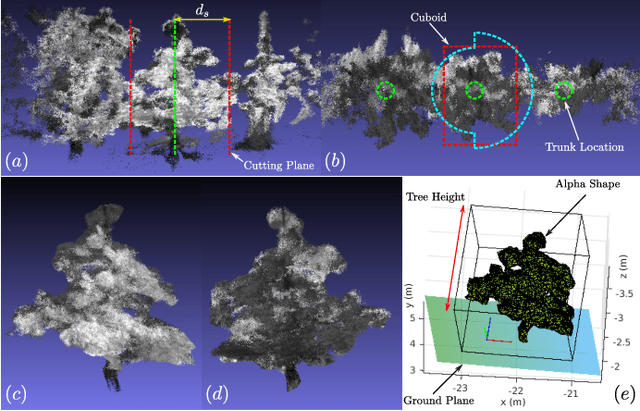
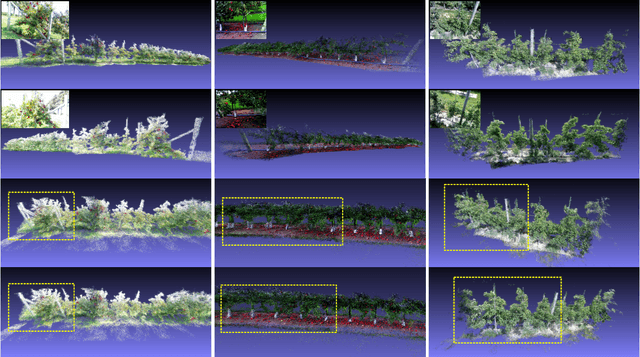
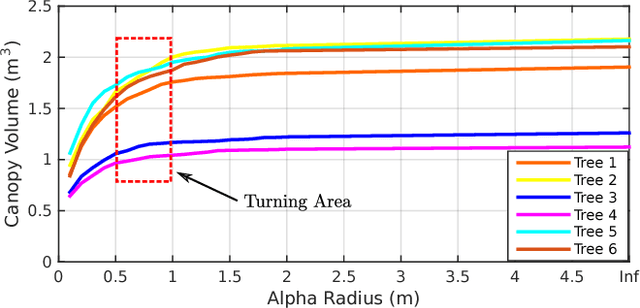
Measuring tree morphology for phenotyping is an essential but labor-intensive activity in horticulture. Researchers often rely on manual measurements which may not be accurate for example when measuring tree volume. Recent approaches on automating the measurement process rely on LIDAR measurements coupled with high-accuracy GPS. Usually each side of a row is reconstructed independently and then merged using GPS information. Such approaches have two disadvantages: (1) they rely on specialized and expensive equipment, and (2) since the reconstruction process does not simultaneously use information from both sides, side reconstructions may not be accurate. We also show that standard loop closure methods do not necessarily align tree trunks well. In this paper, we present a novel vision system that employs only an RGB-D camera to estimate morphological parameters. A semantics-based mapping algorithm merges the two-sides 3D models of tree rows, where integrated semantic information is obtained and refined by robust fitting algorithms. We focus on measuring tree height, canopy volume and trunk diameter from the optimized 3D model. Experiments conducted in real orchards quantitatively demonstrate the accuracy of our method.