 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTravel time optimization on multi-AGV routing by reverse annealing
Paper and Code
Apr 25, 2022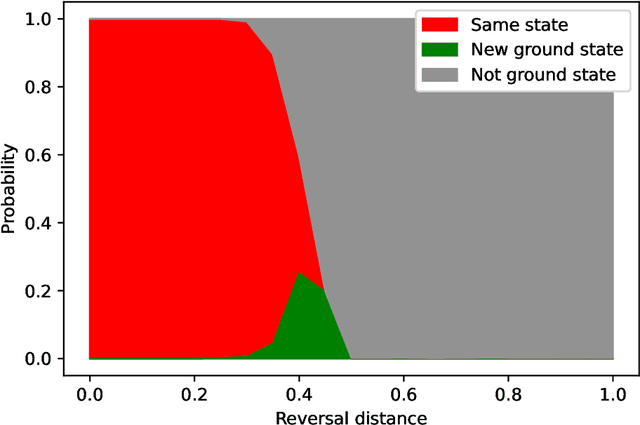

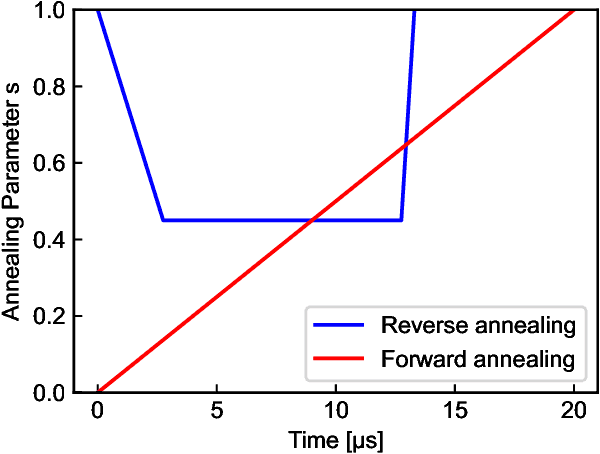
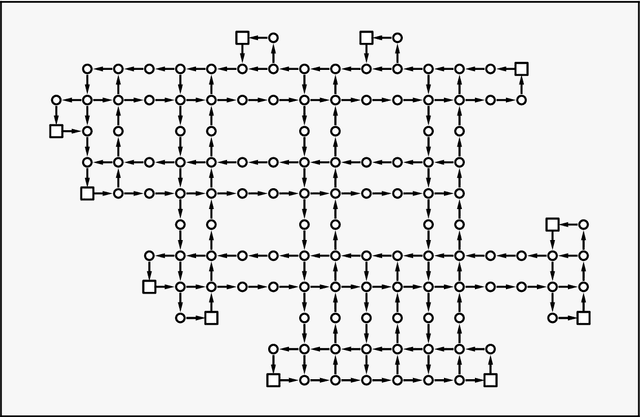
Quantum annealing has been actively researched since D-Wave Systems produced the first commercial machine in 2011. Controlling a large fleet of automated guided vehicles is one of the real-world applications utilizing quantum annealing. In this study, we propose a formulation to control the traveling routes to minimize the travel time. We validate our formulation through simulation in a virtual plant and authenticate the effectiveness for faster distribution compared to a greedy algorithm that does not consider the overall detour distance. Furthermore, we utilize reverse annealing to maximize the advantage of the D-Wave's quantum annealer. Starting from relatively good solutions obtained by a fast greedy algorithm, reverse annealing searches for better solutions around them. Our reverse annealing method improves the performance compared to standard quantum annealing alone and performs up to 10 times faster than the strong classical solver, Gurobi. This study extends a use of optimization with general problem solvers in the application of multi-AGV systems and reveals the potential of reverse annealing as an optimizer.