 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransferring Knowledge for Reinforcement Learning in Contact-Rich Manipulation
Paper and Code
Sep 19, 2022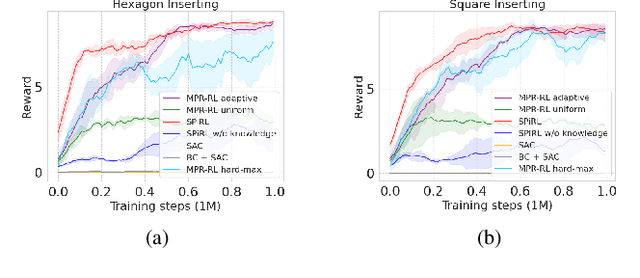
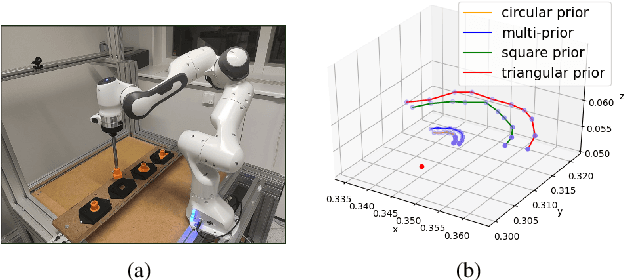
In manufacturing, assembly tasks have been a challenge for learning algorithms due to variant dynamics of different environments. Reinforcement learning (RL) is a promising framework to automatically learn these tasks, yet it is still not easy to apply a learned policy or skill, that is the ability of solving a task, to a similar environment even if the deployment conditions are only slightly different. In this paper, we address the challenge of transferring knowledge within a family of similar tasks by leveraging multiple skill priors. We propose to learn prior distribution over the specific skill required to accomplish each task and compose the family of skill priors to guide learning the policy for a new task by comparing the similarity between the target task and the prior ones. Our method learns a latent action space representing the skill embedding from demonstrated trajectories for each prior task. We have evaluated our method on a set of peg-in-hole insertion tasks and demonstrate better generalization to new tasks that have never been encountered during training.