 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Optimization for High-Dimensional Nonlinear Systems under STL Specifications
Paper and Code
Nov 13, 2020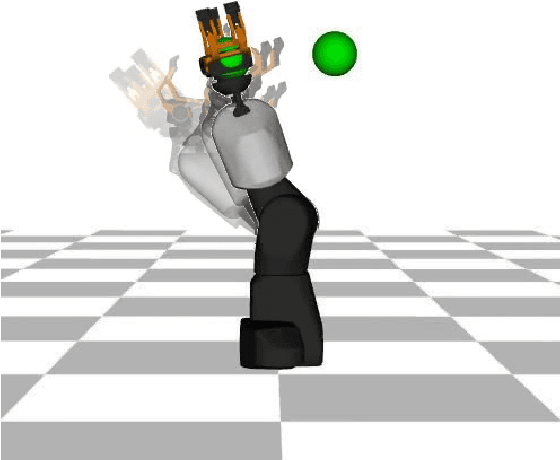
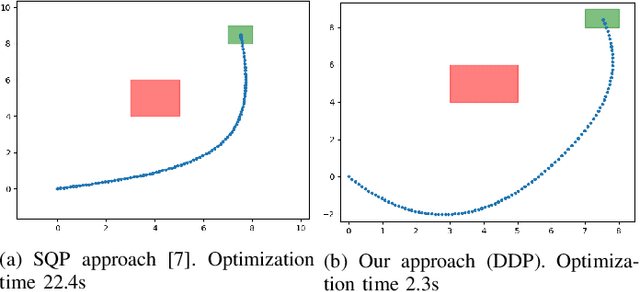

Signal Temporal Logic (STL) has gained popularity in recent years as a specification language for cyber-physical systems, especially in robotics. Beyond being expressive and easy to understand, STL is appealing because the synthesis problem---generating a trajectory that satisfies a given specification---can be formulated as a trajectory optimization problem. Unfortunately, the associated cost function is nonsmooth and non-convex. As a result, existing synthesis methods scale poorly to high-dimensional nonlinear systems. In this letter, we present a new trajectory optimization approach for STL synthesis based on Differential Dynamic Programming (DDP). It is well known that DDP scales well to extremely high-dimensional nonlinear systems like robotic quadrupeds and humanoids: we show that these advantages can be harnessed for STL synthesis. We prove the soundness of our proposed approach, demonstrate order-of-magnitude speed improvements over the state-of-the-art on several benchmark problems, and demonstrate the scalability of our approach to the full nonlinear dynamics of a 7 degree-of-freedom robot arm.