 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory optimization for contact-rich motions using implicit differential dynamic programming
Paper and Code



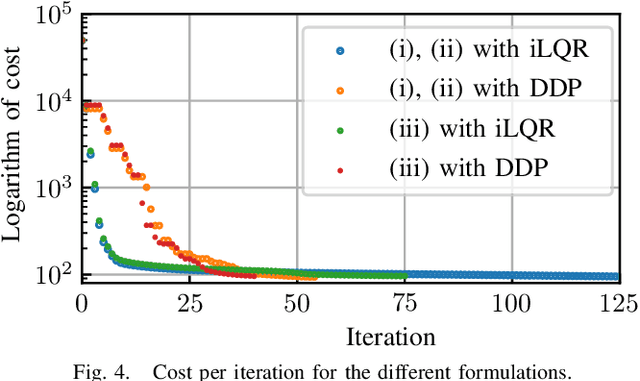
This paper presents a novel approach using sensitivity analysis for generalizing Differential Dynamic Programming (DDP) to systems characterized by implicit dynamics, such as those modelled via inverse dynamics and variational or implicit integrators. It leads to a more general formulation of DDP, enabling for example the use of the faster recursive Newton-Euler inverse dynamics. We leverage the implicit formulation for precise and exact contact modelling in DDP, where we focus on two contributions: (1) Contact dynamics in acceleration level that enables high-order integration schemes; (2) Formulation using an invertible contact model in the forward pass and a closed form solution in the backward pass to improve the numerical resolution of contacts. The performance of the proposed framework is validated (1) by comparing implicit versus explicit DDP for the swing-up of a double pendulum, and (2) by planning motions for two tasks using a single leg model making multi-body contacts with the environment: standing up from ground, where a priori contact enumeration is challenging, and maintaining balance under an external perturbation.