 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrajectory Generation with Fast Lidar-based 3D Collision Avoidance for Agile MAVs
Paper and Code
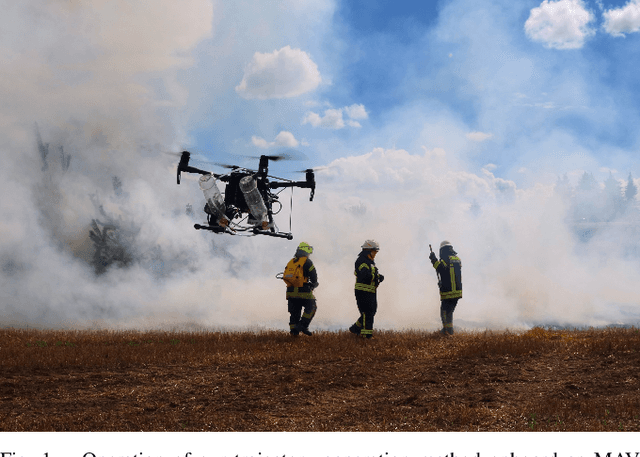
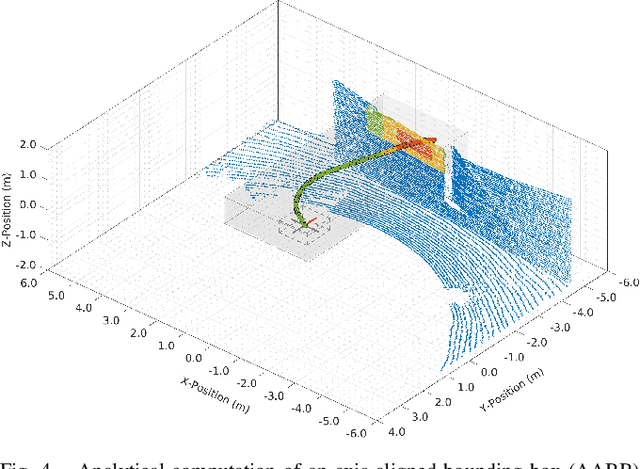
Micro aerial vehicles (MAVs), are frequently used for exploration, examination, and surveillance during search and rescue missions. Manually piloting these robots under stressful conditions provokes pilot errors and can result in crashes with disastrous consequences. Also, during fully autonomous flight, planned high-level trajectories can be erroneous and steer the robot into obstacles. In this work, we propose an approach to efficiently compute smooth, time-optimal trajectories MAVs that avoid obstacles. Our method first computes a trajectory from the start to an arbitrary target state, including position, velocity, and acceleration. It respects input- and state-constraints and is thus dynamically feasible. Afterward, we efficiently check the trajectory for collisions in the 3D-point cloud, recorded with the onboard lidar. We exploit the piecewise polynomial formulation of our trajectories to analytically compute axis-aligned bounding boxes (AABB) to speed up the collision checking process. If collisions occur, we generate a set of alternative trajectories in real-time. Alternative trajectories bring the MAV in a safe state, while still pursuing the original goal. Subsequently, we choose and execute the best collision-free alternative trajectory based on a distance metric. The evaluation in simulation and during a real firefighting exercise shows the capability of our method.