 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTraffic Surveillance Camera Calibration by 3D Model Bounding Box Alignment for Accurate Vehicle Speed Measurement
Paper and Code
Jun 01, 2017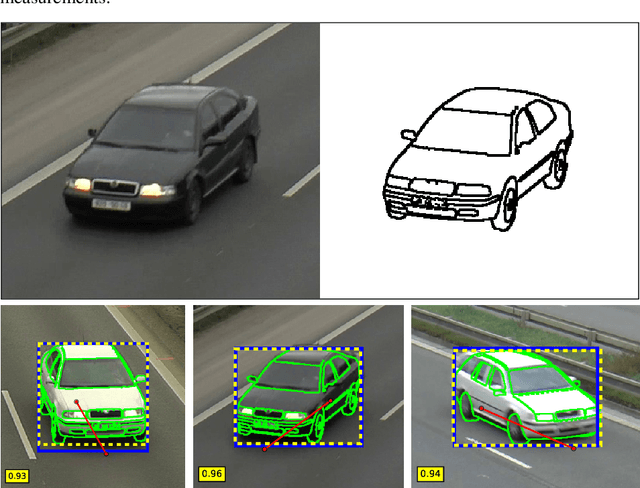
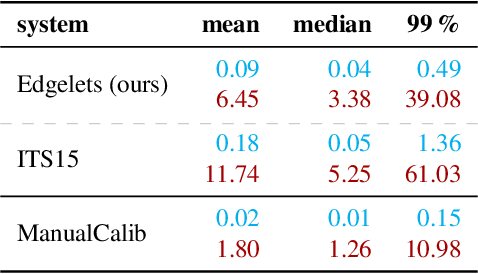


In this paper, we focus on fully automatic traffic surveillance camera calibration, which we use for speed measurement of passing vehicles. We improve over a recent state-of-the-art camera calibration method for traffic surveillance based on two detected vanishing points. More importantly, we propose a novel automatic scene scale inference method. The method is based on matching bounding boxes of rendered 3D models of vehicles with detected bounding boxes in the image. The proposed method can be used from arbitrary viewpoints, since it has no constraints on camera placement. We evaluate our method on the recent comprehensive dataset for speed measurement BrnoCompSpeed. Experiments show that our automatic camera calibration method by detection of two vanishing points reduces error by 50% (mean distance ratio error reduced from 0.18 to 0.09) compared to the previous state-of-the-art method. We also show that our scene scale inference method is more precise, outperforming both state-of-the-art automatic calibration method for speed measurement (error reduction by 86% -- 7.98km/h to 1.10km/h) and manual calibration (error reduction by 19% -- 1.35km/h to 1.10km/h). We also present qualitative results of the proposed automatic camera calibration method on video sequences obtained from real surveillance cameras in various places, and under different lighting conditions (night, dawn, day).