 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards View-invariant and Accurate Loop Detection Based on Scene Graph
Paper and Code
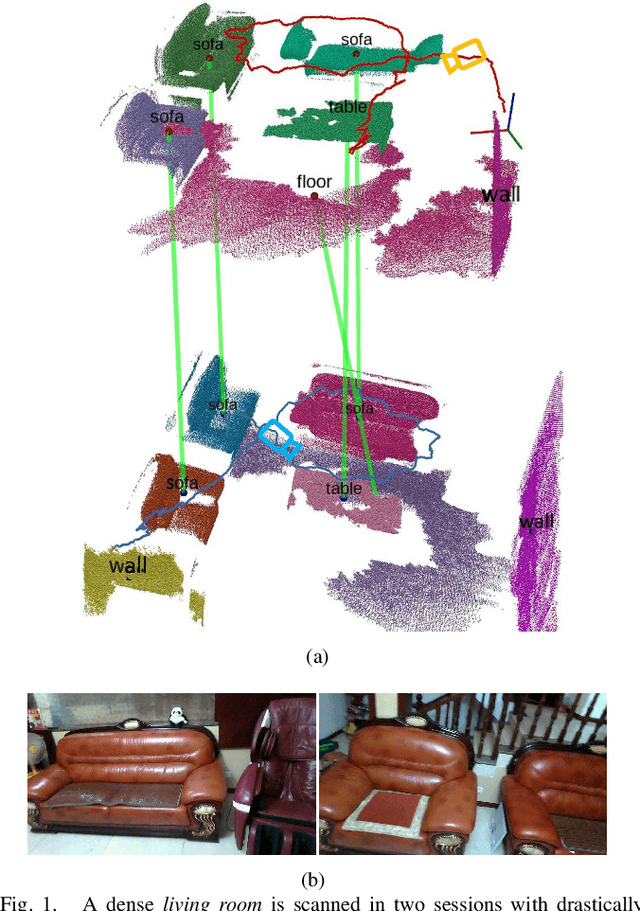
Loop detection plays a key role in visual Simultaneous Localization and Mapping (SLAM) by correcting the accumulated pose drift. In indoor scenarios, the richly distributed semantic landmarks are view-point invariant and hold strong descriptive power in loop detection. The current semantic-aided loop detection embeds the topology between semantic instances to search a loop. However, current semantic-aided loop detection methods face challenges in dealing with ambiguous semantic instances and drastic viewpoint differences, which are not fully addressed in the literature. This paper introduces a novel loop detection method based on an incrementally created scene graph, targeting the visual SLAM at indoor scenes. It jointly considers the macro-view topology, micro-view topology, and occupancy of semantic instances to find correct correspondences. Experiments using handheld RGB-D sequence show our method is able to accurately detect loops in drastically changed viewpoints. It maintains a high precision in observing objects with similar topology and appearance. Our method also demonstrates that it is robust in changed indoor scenes.