 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Safe and Efficient Through-the-Canopy Autonomous Fruit Counting with UAVs
Paper and Code
Sep 26, 2024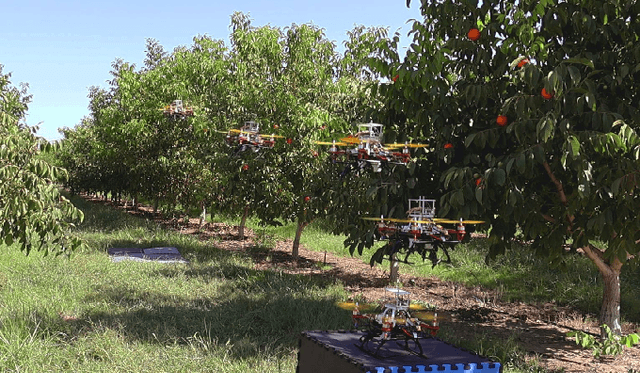
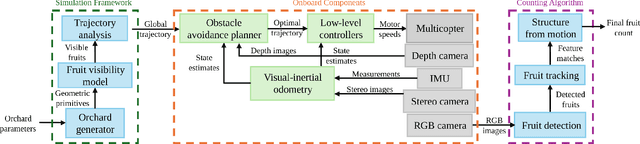
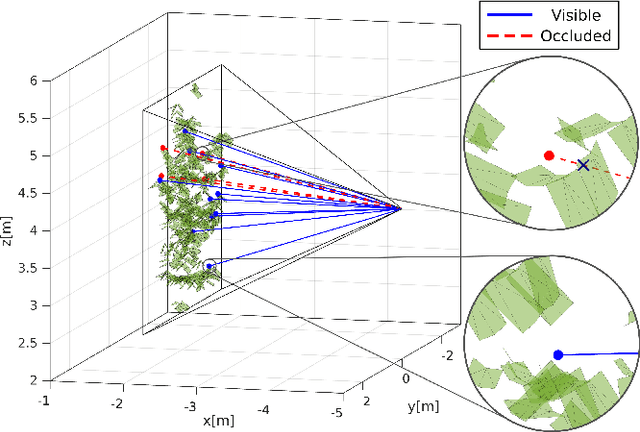
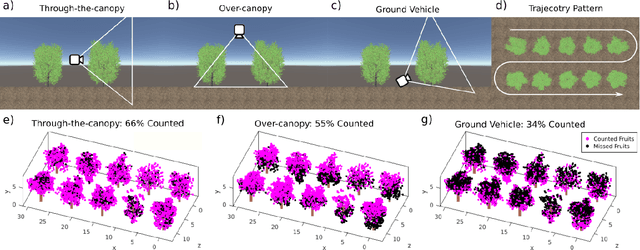
We present an autonomous aerial system for safe and efficient through-the-canopy fruit counting. Aerial robot applications in large-scale orchards face significant challenges due to the complexity of fine-tuning flight paths based on orchard layouts, canopy density, and plant variability. Through-the-canopy navigation is crucial for minimizing occlusion by leaves and branches but is more challenging due to the complex and dense environment compared to traditional over-the-canopy flights. Our system addresses these challenges by integrating: i) a high-fidelity simulation framework for optimizing flight trajectories, ii) a low-cost autonomy stack for canopy-level navigation and data collection, and iii) a robust workflow for fruit detection and counting using RGB images. We validate our approach through fruit counting with canopy-level aerial images and by demonstrating the autonomous navigation capabilities of our experimental vehicle.