 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Geometric Motion Planning for High-Dimensional Systems: Gait-Based Coordinate Optimization and Local Metrics
Paper and Code
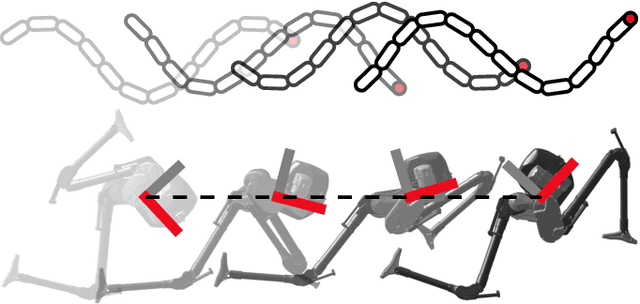
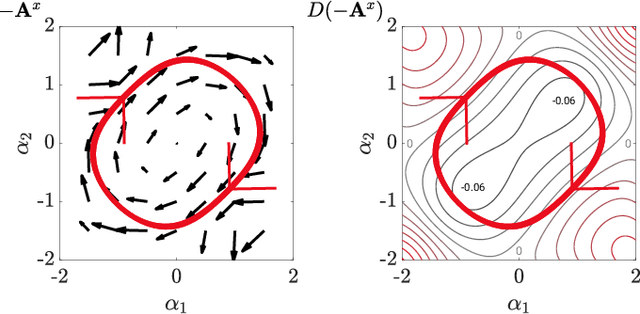
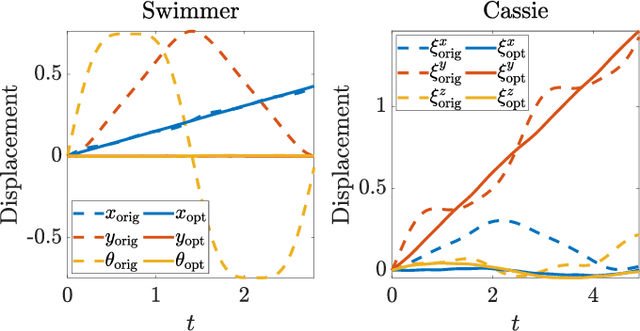
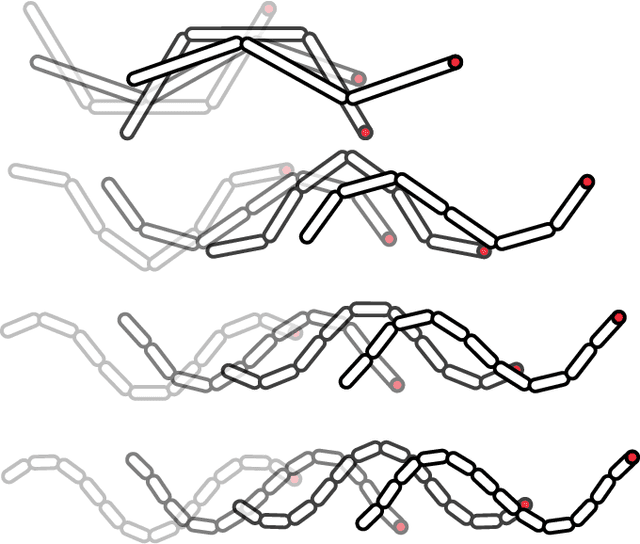
Geometric motion planning offers effective and interpretable gait analysis and optimization tools for locomoting systems. However, due to the curse of dimensionality in coordinate optimization, a key component of geometric motion planning, it is almost infeasible to apply current geometric motion planning to high-dimensional systems. In this paper, we propose a gait-based coordinate optimization method that overcomes the curse of dimensionality. We also identify a unified geometric representation of locomotion by generalizing various nonholonomic constraints into local metrics. By combining these two approaches, we take a step towards geometric motion planning for high-dimensional systems. We test our method in two classes of high-dimensional systems - low Reynolds number swimmers and free-falling Cassie - with up to 11-dimensional shape variables. The resulting optimal gait in the high-dimensional system shows better efficiency compared to that of the reduced-order model. Furthermore, we provide a geometric optimality interpretation of the optimal gait.