 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Generalisable Deep Inertial Tracking via Geometry-Aware Learning
Paper and Code
Jun 29, 2021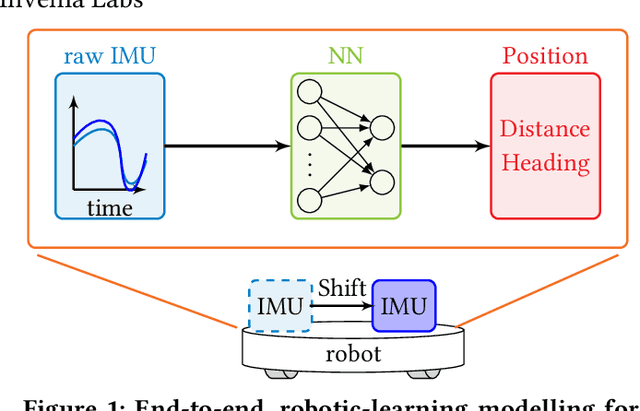
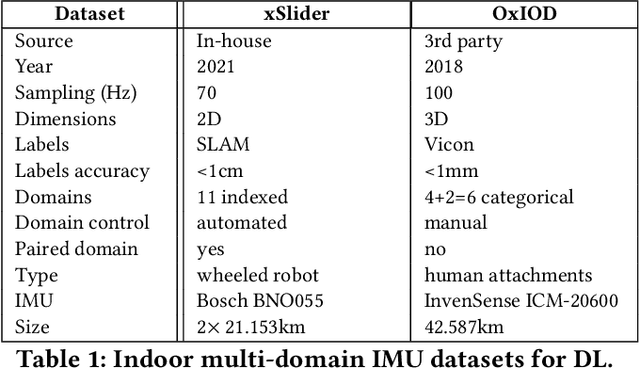
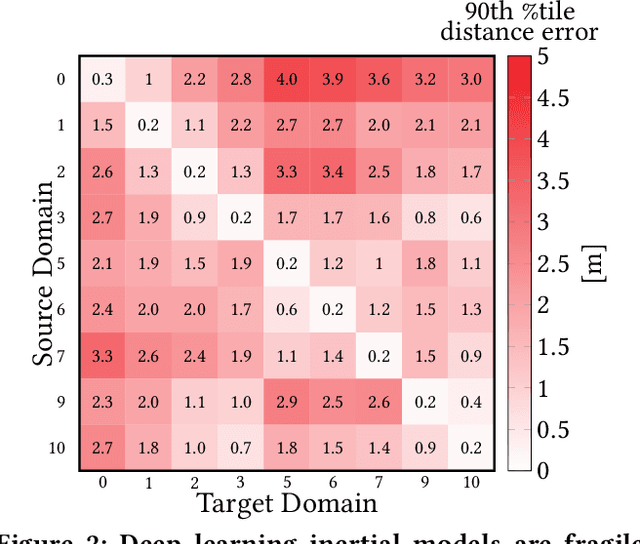
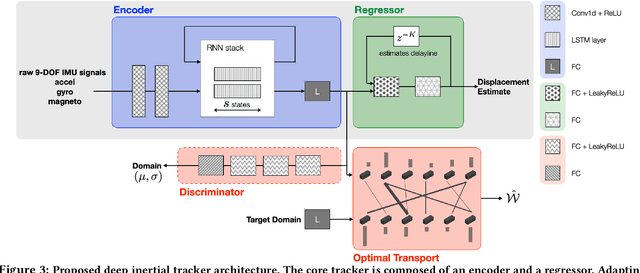
Autonomous navigation in uninstrumented and unprepared environments is a fundamental demand for next generation indoor and outdoor location-based services. To bring about such ambition, a suite of collaborative sensing modalities is required in order to sustain performance irrespective of challenging dynamic conditions. Of the many modalities on offer, inertial tracking plays a key role under momentary unfavourable operational conditions owing to its independence of the surrounding environment. However, inertial tracking has traditionally (i) suffered from excessive error growth and (ii) required extensive and cumbersome tuning. Both of these issues have limited the appeal and utility of inertial tracking. In this paper, we present DIT: a novel Deep learning Inertial Tracking system that overcomes prior limitations; namely, by (i) significantly reducing tracking drift and (ii) seamlessly constructing robust and generalisable learned models. DIT describes two core contributions: (i) DIT employs a robotic platform augmented with a mechanical slider subsystem that automatically samples inertial signal variabilities arising from different sensor mounting geometries. We use the platform to curate in-house a 7.2 million sample dataset covering an aggregate distance of 21 kilometres split into 11 indexed sensor mounting geometries. (ii) DIT uses deep learning, optimal transport, and domain adaptation (DA) to create a model which is robust to variabilities in sensor mounting geometry. The overall system synthesises high-performance and generalisable inertial navigation models in an end-to-end, robotic-learning fashion. In our evaluation, DIT outperforms an industrial-grade sensor fusion baseline by 10x (90th percentile) and a state-of-the-art adversarial DA technique by > 2.5x in performance (90th percentile) and >10x in training time.