 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Feasible Dynamic Grasping: Leveraging Gaussian Process Distance Field, SE(3) Equivariance and Riemannian Mixture Models
Paper and Code
Nov 08, 2023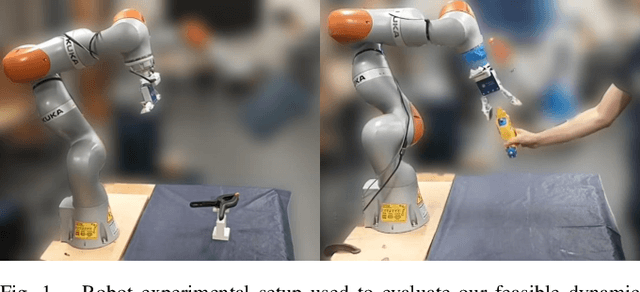

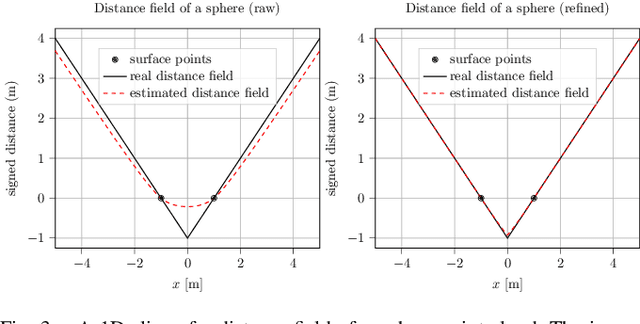

In this paper, we present a novel approach towards feasible dynamic grasping by leveraging Gaussian Process Distance Fields (GPDF), SE(3) equivariance, and Riemannian Mixture Models. We seek to improve the grasping capabilities of robots in dynamic tasks where objects may be moving. The proposed method combines object shape reconstruction, grasp sampling, and grasp pose selection to enable effective grasping in such scenarios. By utilizing GPDF, the approach accurately models the shape and physical properties of objects, allowing for precise grasp planning. SE(3) equivariance ensures that the sampled grasp poses are equivariant to the object's pose. Additionally, Riemannian Gaussian Mixture Models are employed to test reachability, providing a feasible and adaptable grasping strategy. The sampled feasible grasp poses are used as targets for novel task or joint space reactive controllers formulated by Gaussian Mixture Models and Gaussian Processes, respectively. Experimental results demonstrate the effectiveness of the proposed approach in generating feasible grasp poses and successful grasping in dynamic environments. (Video: https://www.youtube.com/watch?v=wjIVrwTzTOc&t=70s)