 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Contact-Aided Motion Planning for Tendon-Driven Continuum Robots
Paper and Code
Feb 21, 2024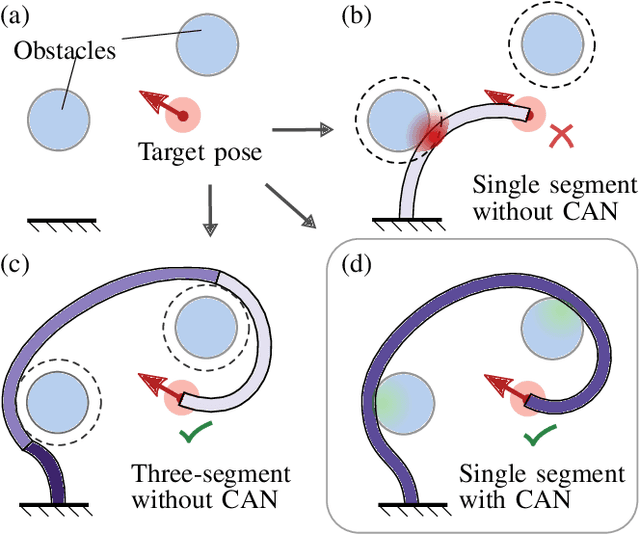
Tendon-driven continuum robots (TDCRs), with their flexible backbones, offer the advantage of being used for navigating complex, cluttered environments. However, to do so, they typically require multiple segments, often leading to complex actuation and control challenges. To this end, we propose a novel approach to navigate cluttered spaces effectively for a single-segment long TDCR which is the simplest topology from a mechanical point of view. Our key insight is that by leveraging contact with the environment we can achieve multiple curvatures without mechanical alterations to the robot. Specifically, we propose a search-based motion planner for a single-segment TDCR. This planner, guided by a specially designed heuristic, discretizes the configuration space and employs a best-first search. The heuristic, crucial for efficient navigation, provides an effective cost-to-go estimation while respecting the kinematic constraints of the TDCR and environmental interactions. We empirically demonstrate the efficiency of our planner-testing over 525 queries in environments with both convex and non-convex obstacles, our planner is demonstrated to have a success rate of about 80% while baselines were not able to obtain a success rate higher than 30%. The difference is attributed to our novel heuristic which is shown to significantly reduce the required search space.